- 心智探奇:人類心智的起源與進化
- (美)史蒂芬·平克 郝耀偉譯
- 1765字
- 2019-01-03 10:51:38
第一部分 心智理論的前世今生
01 心智是什么
心智是一個由若干計算器官所組成的系統,它是我們祖先在解決生存問題的進程中“自然選擇”出來的。心智不是大腦,而是大腦所做的事情。人是心智進化的產物,而不是剃光了毛的“裸猿”。心智進化的最終目的是為了復制最大數量的基因,而正是基因創造了心智。
為什么小說里有那么多機器人,生活中卻一個也沒有呢?我倒是很想花大價錢買一個機器人,讓它幫我收拾碗筷或供我差遣跑腿。不過在這個世紀里,我是沒機會了,恐怕下個世紀也懸 。當然,裝配線上是有從事焊接或噴漆工作的機器人,實驗室過道里也有機器人滾來滾去,不過我指的是那些能夠行走、講話、視物和思考的機器人,這些機器人往往比它們的人類主人干活還要棒。自從1920年卡雷爾·卡佩克(Karel?apek)在他的劇本《羅素姆萬能機器人》(Rossum' s Universal Robots)中第一次使用Robot(機器人)這個詞以后,劇作家們便馳騁想象,不斷地使用這個概念:艾薩克·阿西莫夫(Isaac Asimov)的《我,機器人》中的斯比迪、俏蒂和戴弗,《禁忌星球》(Forbidden Planet)中的羅比,《迷失太空》(Lost in Space)中的連枷彈桶,《神秘博士》(Dr. Who)中的達勒克外星人,《摩登家族》(The Jetsons)中的蘿西和麥德,《星際迷航》(Star Trek)中的諾麥德,《糊涂偵探》(Get Smart)中的希米,《傻瓜大鬧科學城》(Sleeper)中沒精打采的男管家和好斗嘴的男裝店員,《星球大戰》(Star War)中的R2D2和C3PO,《終結者》(The Terminator)中的終結者,《星際迷航:下一代》(Star Trek: The Next Generation)中的上尉指揮官,以及《神秘科學劇院3000》(Mystery Science Theater 3000)中妙語連珠的影評家。
。當然,裝配線上是有從事焊接或噴漆工作的機器人,實驗室過道里也有機器人滾來滾去,不過我指的是那些能夠行走、講話、視物和思考的機器人,這些機器人往往比它們的人類主人干活還要棒。自從1920年卡雷爾·卡佩克(Karel?apek)在他的劇本《羅素姆萬能機器人》(Rossum' s Universal Robots)中第一次使用Robot(機器人)這個詞以后,劇作家們便馳騁想象,不斷地使用這個概念:艾薩克·阿西莫夫(Isaac Asimov)的《我,機器人》中的斯比迪、俏蒂和戴弗,《禁忌星球》(Forbidden Planet)中的羅比,《迷失太空》(Lost in Space)中的連枷彈桶,《神秘博士》(Dr. Who)中的達勒克外星人,《摩登家族》(The Jetsons)中的蘿西和麥德,《星際迷航》(Star Trek)中的諾麥德,《糊涂偵探》(Get Smart)中的希米,《傻瓜大鬧科學城》(Sleeper)中沒精打采的男管家和好斗嘴的男裝店員,《星球大戰》(Star War)中的R2D2和C3PO,《終結者》(The Terminator)中的終結者,《星際迷航:下一代》(Star Trek: The Next Generation)中的上尉指揮官,以及《神秘科學劇院3000》(Mystery Science Theater 3000)中妙語連珠的影評家。
本書講的不是機器人,而是人的心智。在后面的章節里,我將試著解釋什么是心智,它來自何方,它怎樣讓我們看見、思考、感覺、交流以及追尋更高層次的目標,如藝術、宗教和哲學。在書中,我將試著揭秘那些人類獨有的怪癖。記憶為什么會逐漸消退?化妝為什么會改變人的容貌?對種族的刻板印象是從哪兒來的,以及什么時候這種成見能激化到非理性的程度?為什么人們會控制不了自己的情緒?什么原因使孩子們變得淘氣頑皮?為什么墜入愛河的人看起來都像傻瓜?什么讓我們發笑?為什么人們會相信鬼神?
不過,想象中機器人與現實中機器人間的差距是我的出發點,因為這是我們了解自身而必須邁出的第一步:我們必須認識到,在那些看來稀松平常的人類心智活動的背后,有一個極為精妙的復雜設計。我們之所以到現在還見不到真正像人一樣的機器人,并不是因為以機械方式重造人類心智是一個錯誤的想法,而是因為我們人類日常處理的工程問題,要比登陸月球或測序人類基因組困難得多,在解決這些工程問題的基礎上我們才能夠視物、行走、計劃以及完成日常事務。大自然又一次找到了巧妙的解決方法,而這些方法,人類工程師們至今還不會復制。當哈姆雷特說“人是怎樣一幅杰作啊!理性何其優雅!才能何其博大!形體和移動又何其簡潔而令人欽嘆啊”的時候,我們該敬畏的不是莎士比亞、莫扎特、愛因斯坦或“天鉤”賈巴爾,而應當是4歲的幼童在他人要求下,將玩具放到架子上的簡單行為。
在設計良好的系統中,其組成部件就像黑箱,它變魔術般履行著職能。心智也是如此。我們用來思索世界的這套“設備”沒有能力審視自身,或審視我們其他的“設備”,來理解這些“設備”是怎么工作的。這使得我們成為一種幻象的犧牲品:即我們自己的心理內部的運作源自某些神明力量、神秘物質或全能的本原。猶太人有關于生命假人的傳說中,一個泥土塑像被刻上神的名字后,便被賦予了生命。許多機器人的故事中都有著類似的情節,例如,維納斯對皮格馬利翁祈禱的回答令雕像伽拉忒亞有了生命,藍色仙女讓匹諾曹復生。現代版的生命假人原型則常出現在一些沒那么有想象力的科學逸事當中。據說,所有的人類心理都可以被一個唯一、萬能的理由所解釋:大腦、文化、語言、社會化、學習、復雜性、自組織和神經網絡動力學。
我想讓您相信,我們的心智充滿生機,不是因為一些神秘縹緲的氣體或是全能的本原。心智就像阿波羅號航天器一樣,是被設計用來解決許多工程問題的產物,因而心智配備了許多高科技系統,而每個系統都是為了解決自身面對的問題。我首先列出這些問題,這些問題既包括機器人的設計規格,也涉及心理學范疇。因為我相信,由認知科學和人工智能學科所發現的、我們自身心智活動所解決的技術難題是科學的偉大發現之一,這一進展足以媲美當初我們發現宇宙是由數以億計的星系所組成的,或者池塘里的一滴水富含大量的微生物。
機器人難題:不簡單的“看”和“走”
制造機器人需要什么?我們暫且不考慮計算行星軌道的超計算能力,先說些人類的簡單能力:視物、行走、抓握、思考有關人與事的問題或計劃如何行動。
在電影中我們經常看到通過機器人眼睛所呈現的場景,這是通過電影制作的常用技術,導演使用魚眼鏡頭帶來失真效果,或者鏡頭當中出現十字準心來實現這一目的。這對我們觀眾來說不影響什么,因為我們已經有了功能齊備的眼睛和大腦。但對于了解機器人的內部構造,毫無幫助。機器人里面并沒有住著“小人”,時刻盯著圖片,告訴機器人看到了什么。如果你真能通過機器人的眼睛看世界,那么你將不會看到帶有十字準心的電影畫面,而是看到圖1-1呈現的圖案。
這個視圖由數百萬個小區域組成,每個數字就代表一個小區域的亮度。小數表示顏色較暗的區域,大數表示顏色較亮的區域。圖1-1顯示的數字源自瞄準一只手的電子照相機產生的真實信號,當然也可以理解為某人盯著一只手時,從他眼睛到大腦的一些神經纖維的激活率。無論是機器人的大腦,還是人腦,要想識別出物體并且在移動中不撞上去,它必須理解這些數字,猜出世界上哪種東西反射的光會形成這樣的影像。這個問題看似簡單,其實很難。
首先,視覺系統必須確定物體邊緣的位置,識別出哪里是背景。但世界不像一本彩色的書一樣,有著黑色的輪廓和實心顏色的區域。映射到我們眼中的世界是一個由許多小陰影碎片組成的鑲嵌圖案。也許有人會猜測,視覺腦在尋找大數區域(較亮的區域)與小數區域(較暗的區域)相接的地方。你可以在圖1-1中找到這一邊界,它就在從頂端右側到底端中部的斜線上。但不幸的是,大多數時候你找不到物體的邊緣,那里只是空白。大數和小數的并列可能是由于許多獨特的安排造成的。圖1-2中的左圖是心理學家帕瓦·辛哈(Pawan Sinha)和愛德華·埃德爾森(Edward Adelson)設計的,它看上去好像是由淺灰和深灰的方磚組成的一道環。
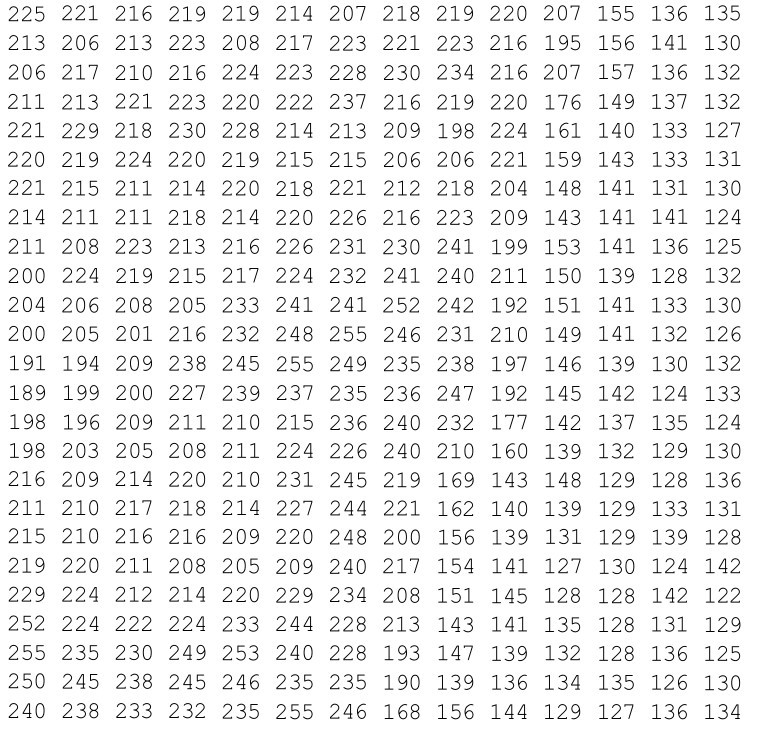
圖1-1 機器人“看到”的世界
事實上,這圖只是一張黑色的紙,中間挖了一個環形的洞,讓我們透過它得以窺見它背后的景致。在圖1-2中的右圖,黑色的紙被移除,你會看到,每一對挨著的灰色方塊實際上代表物體不同的擺放方式。
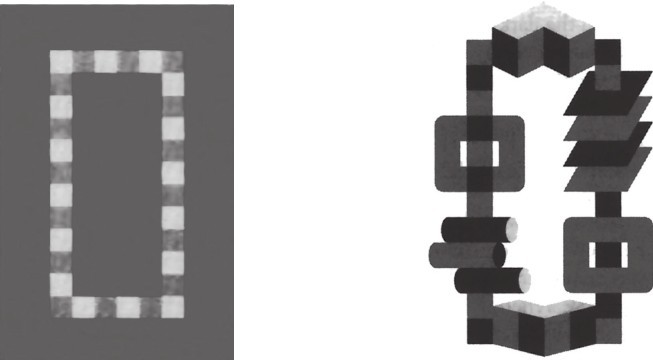
圖1-2 覆蓋與還原
大數挨著小數,可能是由于一個物體立在另一個物體的前面,或深顏色紙放在淺顏色紙的上面,或表面涂有兩種灰度的陰影,或兩個物體緊緊挨著,或白紙上放著灰色玻璃紙,或兩面墻相交的內角或外角,或是一個陰影。大腦總得想辦法解決這個雞—蛋難題:根據視網膜的小區域識別出三維物體,通過判斷每一片區域是什么東西的一部分,進而區分開每一個小區域是什么(陰影還是涂色,褶皺還是覆蓋,透明還是不透明)。
然而,困難才剛剛開始。在我們知道了如何將由視覺所感受到的世界切割成一個個物體后,我們還需要知道物體是由什么做的,比方說,是雪還是煤。乍一看,問題似乎很簡單。如果大數來自亮的區域,小數來自暗的區域,那么大數就等于白色,也就是等于雪,小數就等于黑色,也就是等于煤。對嗎?錯。照到一小片視網膜上光的數量不僅取決于物體灰或黑的程度,而且取決于照亮物體的光的明亮或微弱程度。攝影師的曝光表會告訴你,屋外一團煤反射的光要比屋內一團雪反射得更多。這就是為什么人們常常會對他們拍出的照片頗感失望,為什么攝影是如此復雜的一門工藝。照相機不會撒謊,它自己的設備決定了,拍出的外景如奶白,內景像泥巴。攝影師(有時照相機中的微芯片也可以)精心處理膠片才得出一幅逼真的圖像,他們用到的技巧包括:調整快門時間控制、鏡頭光圈、拍攝速度、閃光燈以及暗室操縱。
我們視覺系統的設計要好得多。它設法讓我們將室外明亮的煤塊看成黑色,把屋內昏暗的雪看成白色。這是個令人愉快的結果,因為這樣,我們意識中對顏色和亮度的感覺就可以與世界原本的狀況相一致,而不是和世界呈現到我們眼睛中的鏡像相一致。不管在室內室外,雪球都是軟的、濕的、隨時可能會融化的;不管在室內室外,我們也都把它看作是白色的。煤塊則總是硬的、臟的,可以燃燒的,我們也總把它看成是黑色的。世界呈現的模樣和它實際情況之間的和諧必定是我們神經系統的杰作,因為黑白二色在視網膜上并不是那么簡單鮮明。假使你還有懷疑,這里有一個日常生活中的例證。傳統CRT電視機關閉時,屏幕上是淡淡的灰綠色。當打開以后,一些磷光點開始發光,顯示為圖像中明亮的區域。但其他的點則并不是吸收光而呈現為暗的區域,它們只是保持灰色不變。你所看到的黑色區域事實上只是電視機關閉時顯像管的灰色陰影。這種黑色是一種虛擬,它是人腦回路的產物,同樣的原理也使你能夠把煤看作煤。制造電視機的工程師們在設計屏幕時不過是利用了這個回路。
下一個問題是,如何立體地視物。我們的眼睛將三維世界轉化為二維的視網膜圖像,第三維則必須由人腦來重新構建。但是,視網膜的小碎片上沒有提示標志,沒法告訴你每個面相距多遠。你手心的一枚郵票可以和屋子對面的一把椅子或幾公里外的一棟樓一樣,在視網膜上映射出同樣大小的一個方塊(見圖1-3上圖)。從正面看一張切割板,隨傾斜度不同,同一張板被看成各種不同的不規則四邊形(見圖1-3下圖)。
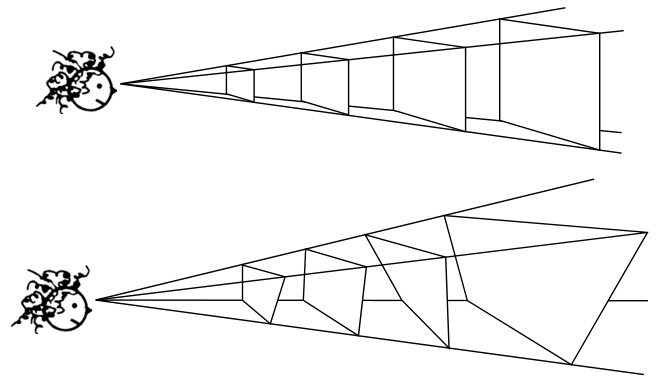
圖1-3 視網膜成像特點
要想感受這種幾何現象的作用,以及處理這種現象的神經機制的運作,你可以盯著一個燈泡持續幾秒鐘或者在閃光燈閃爍時看著照相機,這會令你的視網膜上暫時出現一小塊兒白色。如果這時你去看一頁書,余像會附在上面,看上去有幾厘米那么大。如果你看著墻,余像會有幾十厘米那么大。如果你看天空,它會有云彩那么大。
最后的問題是,視覺模塊如何認出外界的物體。機器人由此可以給物體起名,或者了解物體可做什么用。最直接的方法是,為每個物體仿照其形狀制作一個模板或者切塊。當物體出現時,它在視網膜上的映像會和自己的模板相吻合,就像壺蓋對壺口一樣。模板將會以形狀的名字作為標簽。例如,在圖1-4中是“字母P”。每當與形狀符合時,模板便讀出其名字。
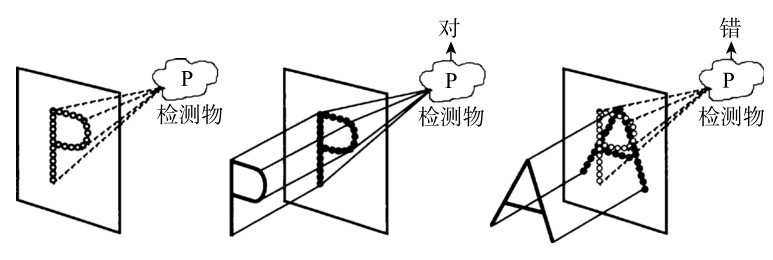
圖1-4
遺憾的是,這種簡單的機制可能會有兩種失效情況。不是P時,它可能會錯認為P。例如,圖1-5第一個方塊中的R被錯認為P。有P的情況下,它還可能認不出P。例如,當字母移動位置、傾斜、歪斜、太遠、太近或太別出心裁時,這種機制就認不出P了,如圖1-5剩下幾個方塊中的情況。

圖1-5 識別不出字母“P”
這些問題才只不過是由于一個簡單的英文字母造成的。想象一下要認出一件上衣或一張臉,那該怎么設計!確切地說,經過40多年人工智能方面的研究,形狀識別的技術已經大大改進。你可以用軟件來掃描一頁紙,識別字符,并比較準確地把它轉化為數碼文本文檔。但人工的形狀識別設備仍遠遠趕不上我們大腦中的設備。人工的設備是為那些原始的、易于識別的世界所設計的,卻應付不了這個雜亂無章、毫無規則的現實世界。支票底端的怪異數字經過了精心的設計,因此沒有形狀重疊,這是由特殊的設備精確定位后才打印的,以便模板可以識別出這些數字。有朝一日,大廈里裝上一臺面部識別器來取代門衛,它也不會去嘗試解讀你的面部輪廓,而會去掃描你的虹膜或視網膜血管的清晰形狀。而我們的大腦卻對我們認識的每張臉(每個字母、動物、工具等)的形狀都保留著相應的記錄,這記錄總是能夠和視網膜上的圖像對得上,即使圖像如我們圖1-5中那樣被扭曲也沒問題。在第4章中我們將具體探討人腦是如何完成這一杰作的。

掃碼關注“廬客匯”,回復“心智探奇”,直達精彩文章:《道金斯眼中的史蒂芬·平克》。
我們來看看另一個日常生活中神奇的地方:把身體從一處移動到另一處。我想讓機器移動,就給它裝上輪子。輪子的發明常被人們驕傲地認為是人類文明最杰出的成就之一。許多教科書指出,沒有任何動物進化到用輪子來移動,并以此事實為例證明,進化往往不能找到最佳方案來解決工程問題。但這根本就不是一個好例子。即使大自然能夠進化出下面長著輪子的駝鹿,駝鹿也肯定選擇不要輪子。輪子只有在有道路和鐵軌的地方才好用,而在任何松軟、濕滑、陡峭或不均勻的地方,輪子都舉步維艱。腿比輪子則要好得多。輪子必須沿著不間斷的支撐面才能滾動,腿卻可以落在一系列分開的立足點上,比如梯子。腿還可以盡量減少歪斜或者跨越障礙。即使現在整個世界好像已經變成了一個大停車場,地球上也只有大約一半陸地可供有輪子或者軌道的交通工具通行,但地球的絕大多數陸地上,有腳的載體——動物卻都可以行走。這正是自然選擇的設計。
但腿的存在是伴隨著高昂成本的,它需要指揮控制裝置。輪子只需轉動,逐漸改變支撐點,就可始終承受重量。腿則必須在極短的時間內改變支撐點,這只有卸掉重量才能做到。控制腿的發動機必須將腳落在地面的同時承受和推動負載,然后再卸掉負載使腿能夠自由移動,如此往復交替進行。在整個過程中,它們還得在腳所站的極小區域內保持身體重心平衡,使身體不致蹣跚倒地。指揮裝置還必須盡量減少無用的上下顛簸運動。在可以行走的棒球投球手玩具中,這個問題的解決依靠了一個精密的機械連接裝置,將旋轉軸轉化為邁步的動作。但這些玩具不能根據地勢狀況做出調整,找到最佳落腳點。
即使我們解決了這些問題,也只不過是搞明白了如何控制一只行走的昆蟲而已。6條腿的昆蟲總是將它的3條腿像三腳架一樣落在地上,而將其余3條腿抬在空中。在任何時刻,它都是比較穩定的。即使對于四足的走獸,在移動不太快時,它們也總能保持3條腿立于地面。但正如一位工程師所描述的:“人類兩腳直立行走,這種設計本身簡直就是一場災難,這需要極高超的控制才能使之可行。”我們行走時,不斷在搖搖欲墜之際重新站穩;我們奔跑時,如飛機起飛剎那陡然啟動。這些特技令我們在落腳空間分布不規則、直立不易的情況下仍能牢牢站立,也讓我們能側身通過狹窄小徑或是輕松跨越障礙。但還是沒有人能搞清楚我們是怎么做到這些的。
控制胳膊又是一項新的挑戰。抓住一個建筑師用的燈罩,沿著對角線把它從離你近的左下方移動到距你遠的右上方。在燈移動時,注意燈桿和燈的合頁。盡管燈罩是在沿直線運動,燈桿卻在以一種復雜的弧度搖擺,有時向下迅速俯沖,有時卻幾乎保持靜止不動,有時又從彎曲移動轉回直線運動。那么我們來反向推理一下:如果你不觀察燈罩,你必須仔細設計每個連接處的扭曲次序,這樣才能令燈罩保持直線運動。這其中所需的三角幾何的復雜程度令人不寒而栗。但其實你的胳膊就是建筑師的燈罩,每次你做出指示動作,所需大量公式都被你的大腦輕而易舉地解決了。你要是曾經用抓燈夾子來拿一盞燈的話,你就會明白,那問題比我剛才所描述的還要難上加難。燈會由于其重量而四處亂甩,就好像它自己有思想一樣,如果你碩大的腦袋不發揮作用解決這個難解的物理問題,那你的胳膊也會那樣。
更令人稱絕的是手的控制。大概2 000年前,希臘醫生蓋倫(Galen)就指出了人手的精妙自然設計。只此一項工具,就足以操控大小不一、形狀重量各異的一應物什,大到一根圓木,小至一顆粟粒。“人類能用手處理各種東西,”蓋倫強調,“而且處理得相當完美,就像手是為每一種東西專門設計的一樣。”手可以做成鉤形鉗(提桶)、剪刀鉗(夾香煙)、五爪卡盤(舉滑板)、三爪卡盤(握鉛筆)、襯墊相接的兩爪卡盤(紉針)、襯墊分隔的兩爪卡盤(擰鑰匙)、擠壓鉗(抓榔頭)、盤形鉗(開罐子)和球形鉗(持球)。每種夾鉗都需要肌肉拉伸的精確組合,將手做成合適的形狀并盡力保持,以對抗載荷的反方向作用。來想想拿起一紙盒牛奶的情況:手抓得太松,它就掉了;抓得太緊,則會把奶擠出來;你還可以輕輕搖一搖,把紙盒拉開,這樣指尖又成了一個小計量器,告訴你里面還有多少牛奶。
我們還沒說舌頭呢,這是個只能通過擠壓來控制的無骨水氣球。它能夠把食物從后牙擠出來,又能像跳芭蕾舞一樣發出“thrilling”(激動的)和“sixth”(第六)這樣詞的聲音來。
“普通人對不普通的事情感到驚嘆;智者對平凡之處感到偉大。”讓我們謹記哲人的名言,來繼續看看人類行為的平凡之處,但我們要換個新的視角,看看機器人設計師是怎樣試圖復制這些平凡之處的。假定我們已經能夠設法建造一個能看能動的機器人了,那么,它看到以后會怎么做?它如何決定自己的行為?
一個智能生命不可能將所看到的任何事物都視為宇宙中獨一無二的個體。智能生命必須將事物劃分范疇,這樣就可以將它艱難習得的,有關從前曾遇到過的相似事物的知識應用于新的事物了。
但是,只要人們試圖列出一套規則標準來劃分一個范疇成員的所屬關系,這個范疇就會分化。且不說諸如“美”或者“相對主義”這樣含糊不清的概念,我們來看看一個教科書上明確定義的概念——“單身漢”。當然了,單身漢就是指從來沒結過婚的成年男性。但現在假設一個朋友請你邀請一些單身漢來參加她的聚會,如果你用這個定義來決定邀請下面哪些人,看看會怎樣。
阿瑟在過去5年一直與愛麗絲愉快地生活在一起。他們有一個兩歲的女兒,但兩人一直沒有在法律上正式登記結婚。
布魯斯就要被征召入伍了,于是他打算和他的朋友芭芭拉請一名太平紳士為他倆主持結婚,因為這樣他就可以免服兵役了。但他倆其實從未生活在一起過。布魯斯談過一些女朋友,并計劃一旦找到他想娶的女孩,就宣布與芭芭拉的這次婚姻無效。
查理17歲,他現在在上高中,同父母住在一起。
戴維17歲,他13歲時離家創辦了一家小企業,現在已是一名成功的年輕企業家。他住在閣樓式的公寓,過著花花公子般的生活。
埃利和埃德加是同性戀情人,兩人生活在一起已經多年。
費塞爾根據其本族法律可以有3位妻子。他已經有了兩位,目前正在尋找另一位可能的未婚妻。
格里高利神父是泰晤士河邊一個小鎮天主教堂的主教。
這份人員列表由計算機科學家泰利·維諾格雷德(Terry Wingograd)擬定,它說明“單身漢”的字面定義并不能概括我們對該范疇成員的直覺。
知道誰是單身漢只是一個常識,但常識一點兒都不平常。人腦或機器人腦中常識的形成也定不尋常。常識絕不是生活的年鑒,可以任由老師傳授或像一個海量數據庫一樣能夠下載。沒有任何數據庫能夠列出所有我們知道的隱含事實,甚至沒有任何人能夠把這些隱含事實教給我們。你知道:當埃爾文把狗裝進車里,狗就不會再在庭院里;埃德娜去教堂,她的頭會隨著她一起去;如果道格在房子里,他一定是通過某個開口進去的,除非他就在里面出生,之后再沒離開過;如果謝拉早晨9點活著,下午5點也活著,她中午也一定活著;野生的斑馬從不穿內褲;打開一罐新牌子的花生醬不會使整座房子蒸發;人們從不把測量腋溫的溫度計放到耳朵里;沙鼠比乞力馬扎羅山要小。
一個智能系統不會僅僅填滿海量的事實,它還需要具備一個清單列出少量的核心真理和一套相應的推導規則。但這種常識規則就像常識范疇一樣,很難毫無爭議地確定。即使是那些最顯而易見的規則也經不起我們的日常邏輯推導。馬維斯住在芝加哥,他有個兒子叫弗雷德;米利也住在芝加哥,他也有個兒子叫弗雷德。但盡管馬維斯和米利都住在同一個城市芝加哥,馬維斯的兒子弗雷德,卻不是米利的兒子弗雷德。如果你車里面有個袋子,袋子里有一加侖牛奶,你可以說你車里有一加侖牛奶。但如果你車里有個人,那個人身體里有一加侖血,你要得出結論,你車里有一加侖血,這就很荒唐。
即使你試圖制訂的只是一套能推導出合理結論的規則,用這些規則來明智地指導行為也絕非易事。很顯然,思考者不能一次只運用一個規則。火柴發光;鋸子鋸木頭;鎖著的門用鑰匙打開。但要是有些人擦著火柴接近油箱,用鋸子鋸他坐著的凳腿,或者把鑰匙鎖在車里,然后花一個小時琢磨怎樣讓車里的家人出來,那我們就會嘲笑他們缺心眼。思考者不僅需要計算其行動的直接效應,還要考慮間接效應。
但思考者也不能事先預測到所有的間接效應。哲學家丹尼爾·丹尼特(Daniel Dennett)讓我們去想象這樣一個情景,一個機器人,我們派它去一個放有炸彈的房間取回一個備用電池。1號機器人看到電池放在一個拖車上,它想如果把拖車拖出屋子,電池就會帶出來了;不幸的是,炸彈也在拖車上。1號機器人不能推導出拖出拖車也會帶出炸彈。2號機器人考慮了它行動的所有間接效應。它剛剛算完拖出拖車不會改變房間墻壁的顏色,正在證明拖車上有輪子而輪子轉圈時,炸彈就爆炸了。3號機器人能夠將相關信息和無關信息區別開來。它坐在那兒盤算出上百萬條內容,并把所有相關的信息列在待考慮的事實清單上,所有無關的列在要忽略的事實清單上,而這時炸彈的倒計時正在嘀嗒嘀嗒地逼近。
智能生命必須依照自己的所知信息盡量地進行思考,但只能是有關的信息。丹尼特指出,這項要求提出了一個深刻的問題,不僅針對機器人設計,而且是一個認識論的問題——對“我們如何知道”的分析。好幾代哲學家都沒有重視這個問題,他們自滿地陶醉著,憑著自己的常識感想當然地以為此問題輕而易舉。只是當人工智能的研究者們試圖在計算機這個終極白板上復制這種常識時,這個難解之謎才浮出水面,現在這個難題被稱為“框架問題”(frame problem)。盡管原因難解,我們只要運用常識,總能夠解決這個框架問題。