- 智能機(jī)器人(人工智能技術(shù)叢書(shū))
- 鄒勤 陳馳編著
- 89字
- 2025-08-27 15:20:51
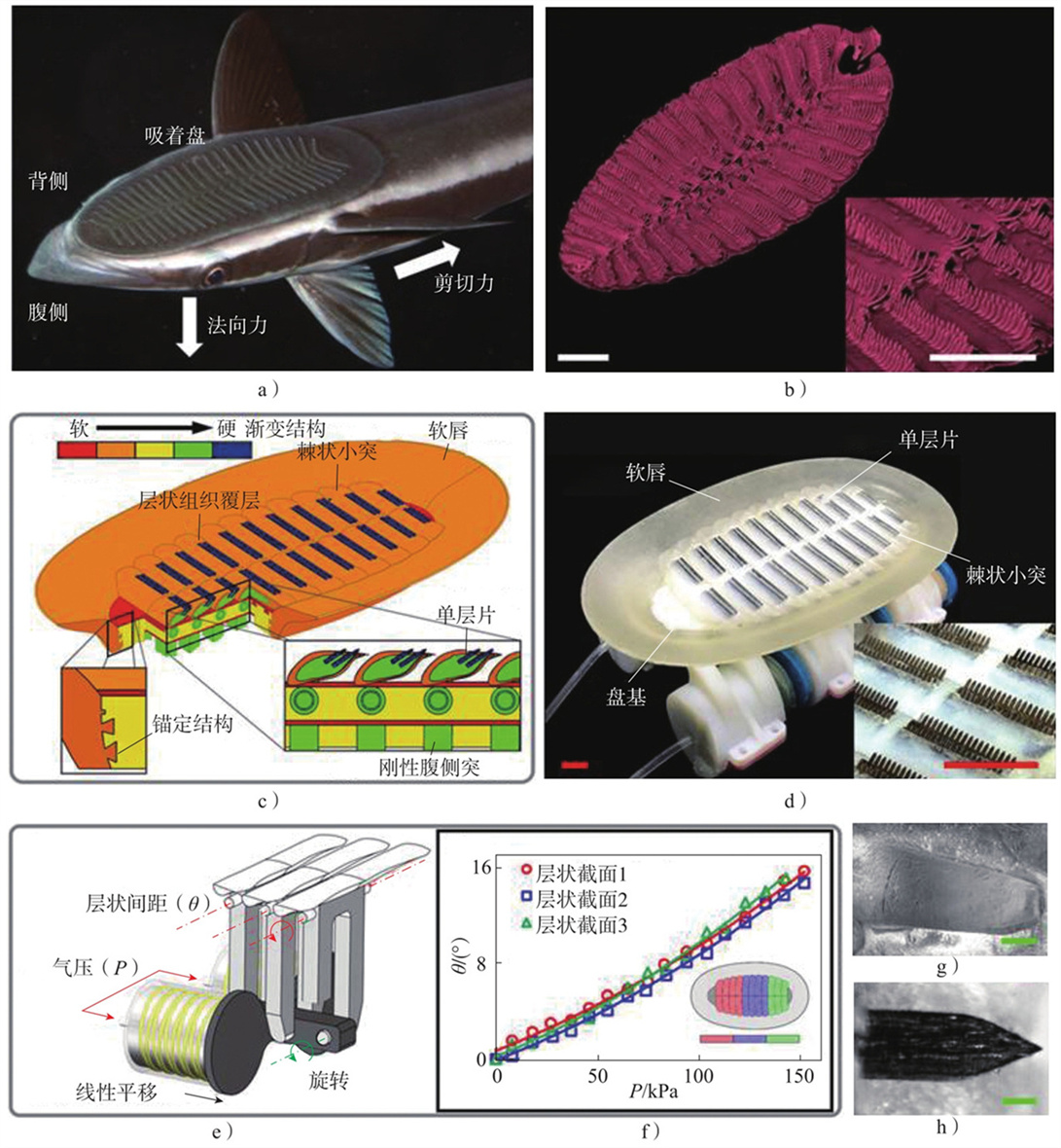
圖1-45 仿生?魚(yú)軟體吸盤機(jī)器人相關(guān)分析
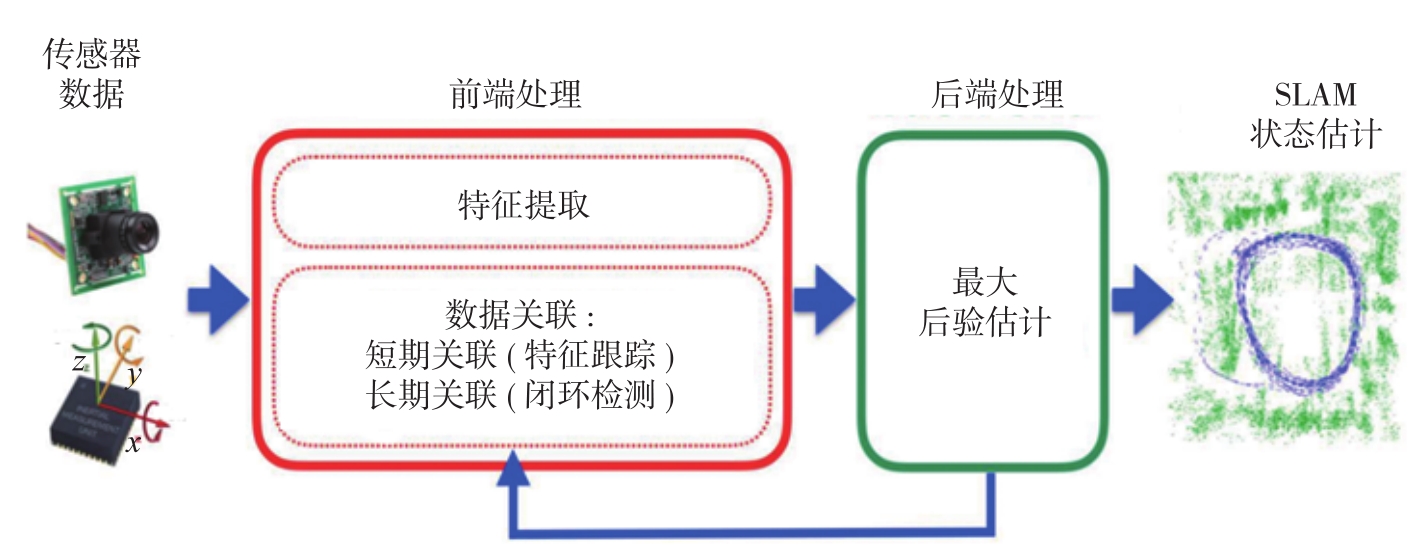
圖1-54 視覺(jué)SLAM計(jì)算框架
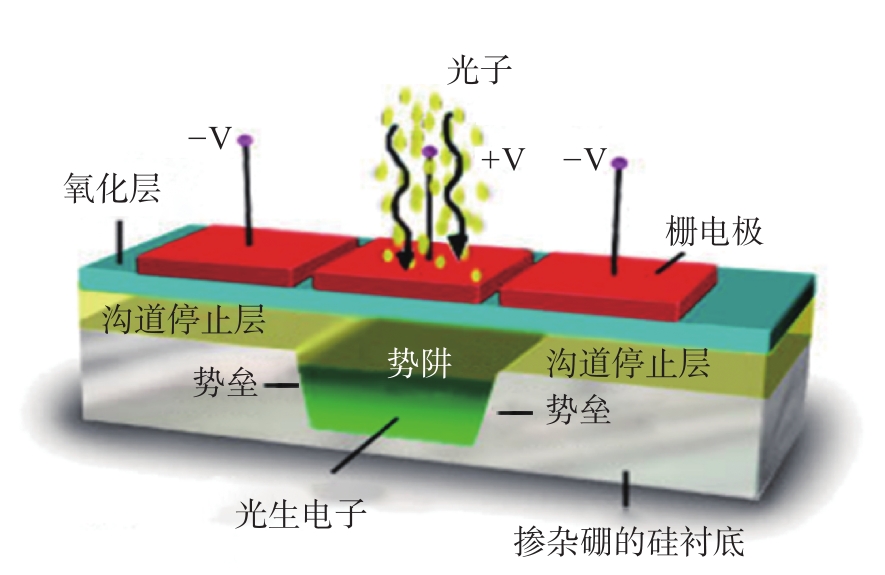
圖3-3 MOS的微觀結(jié)構(gòu)
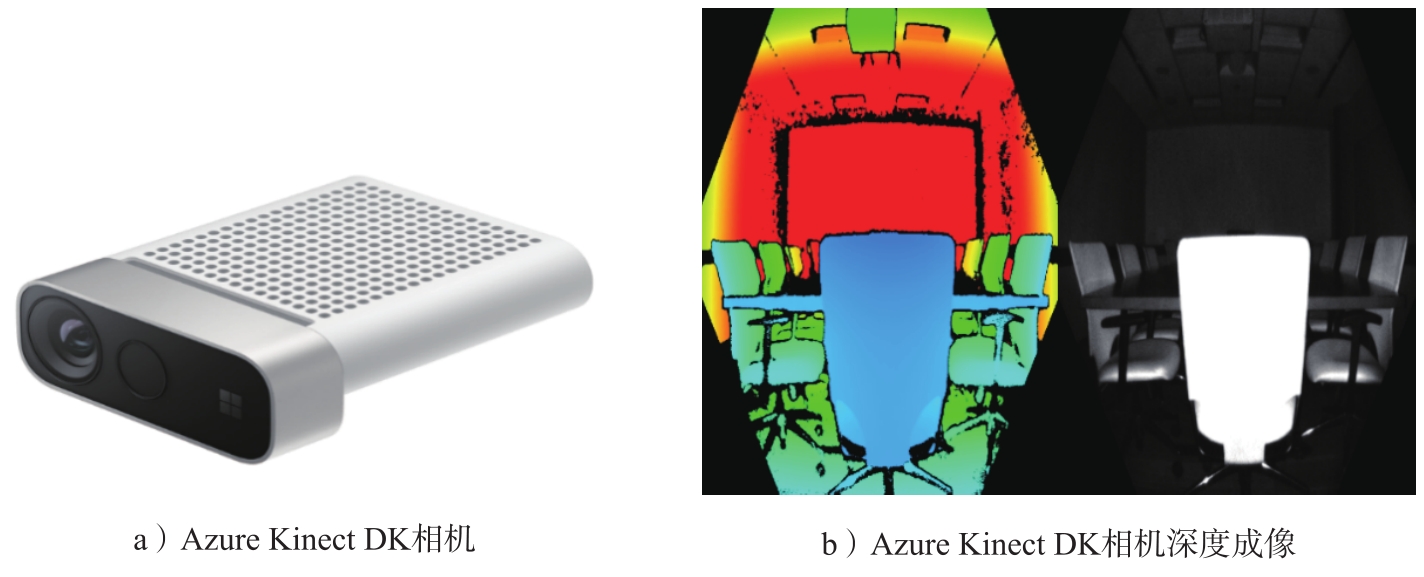
圖3-45 Azure Kinect DK深度相機(jī)
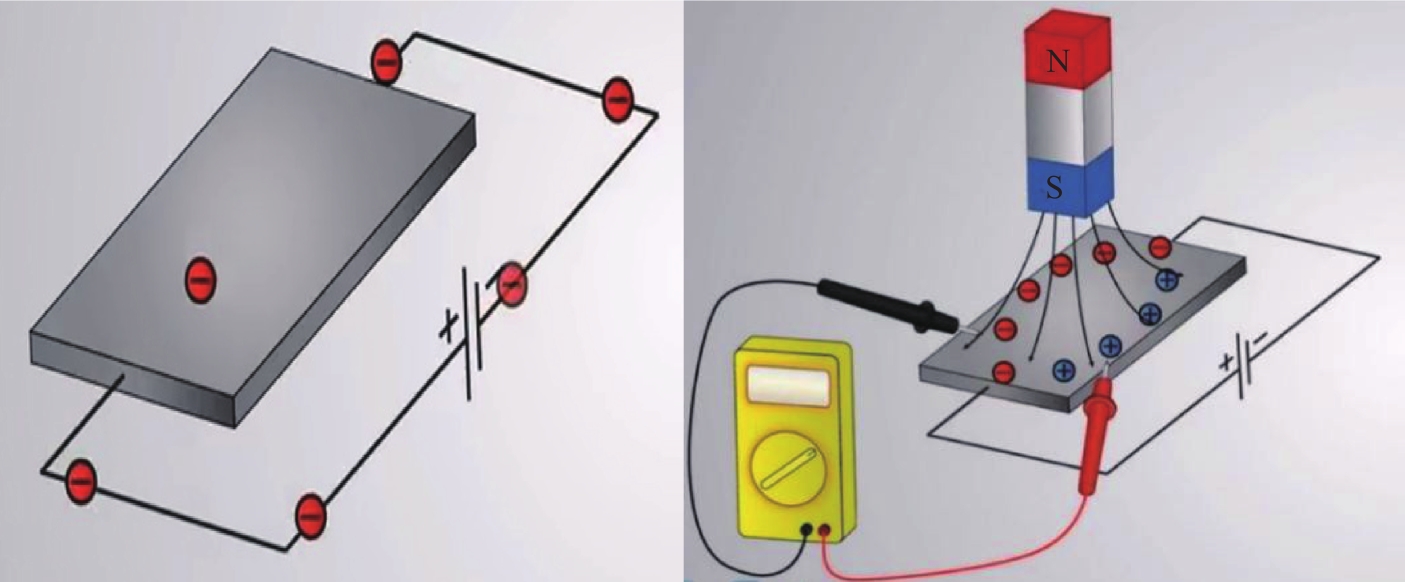
圖3-74 磁力計(jì)的工作原理
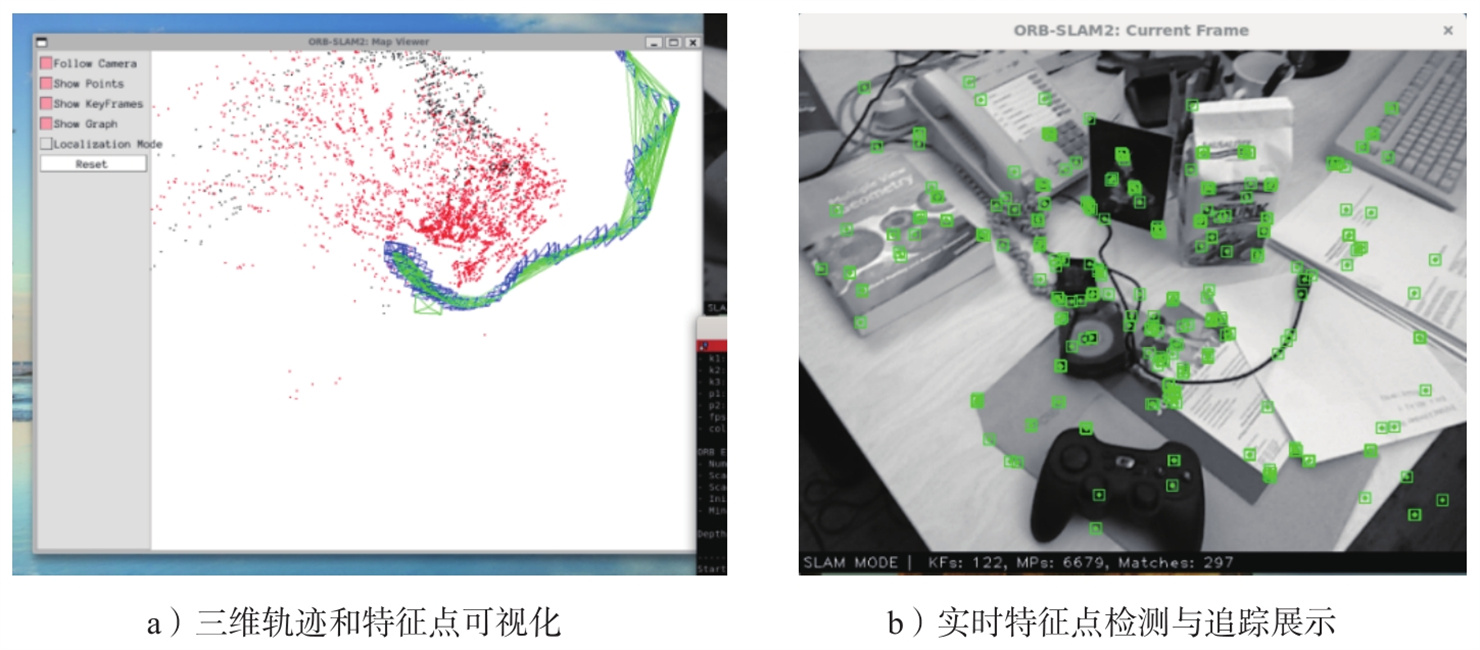
圖4-22 ORB-SLAM2運(yùn)行TUM數(shù)據(jù)集的效果
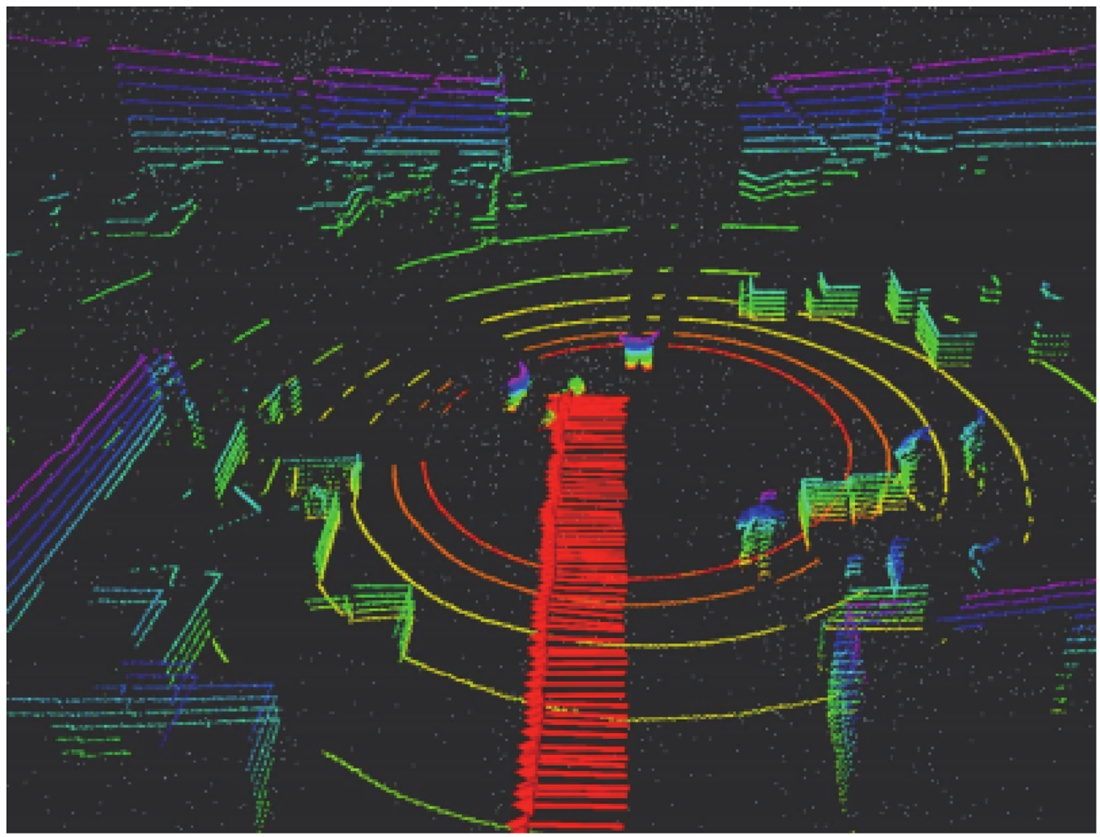
圖4-30 由LOAM算法生成的點(diǎn)云圖
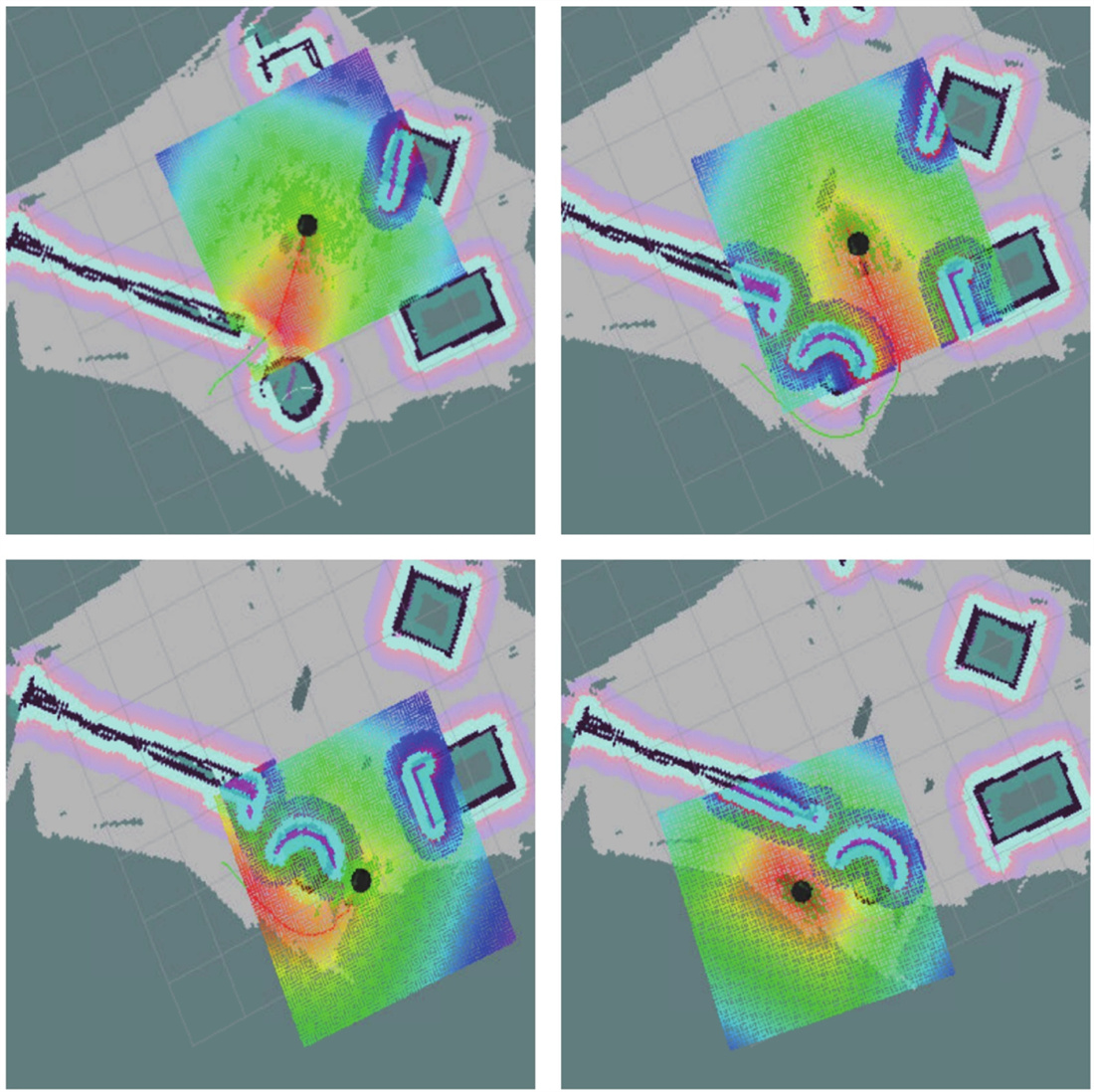
圖4-41 手柄控制的導(dǎo)航
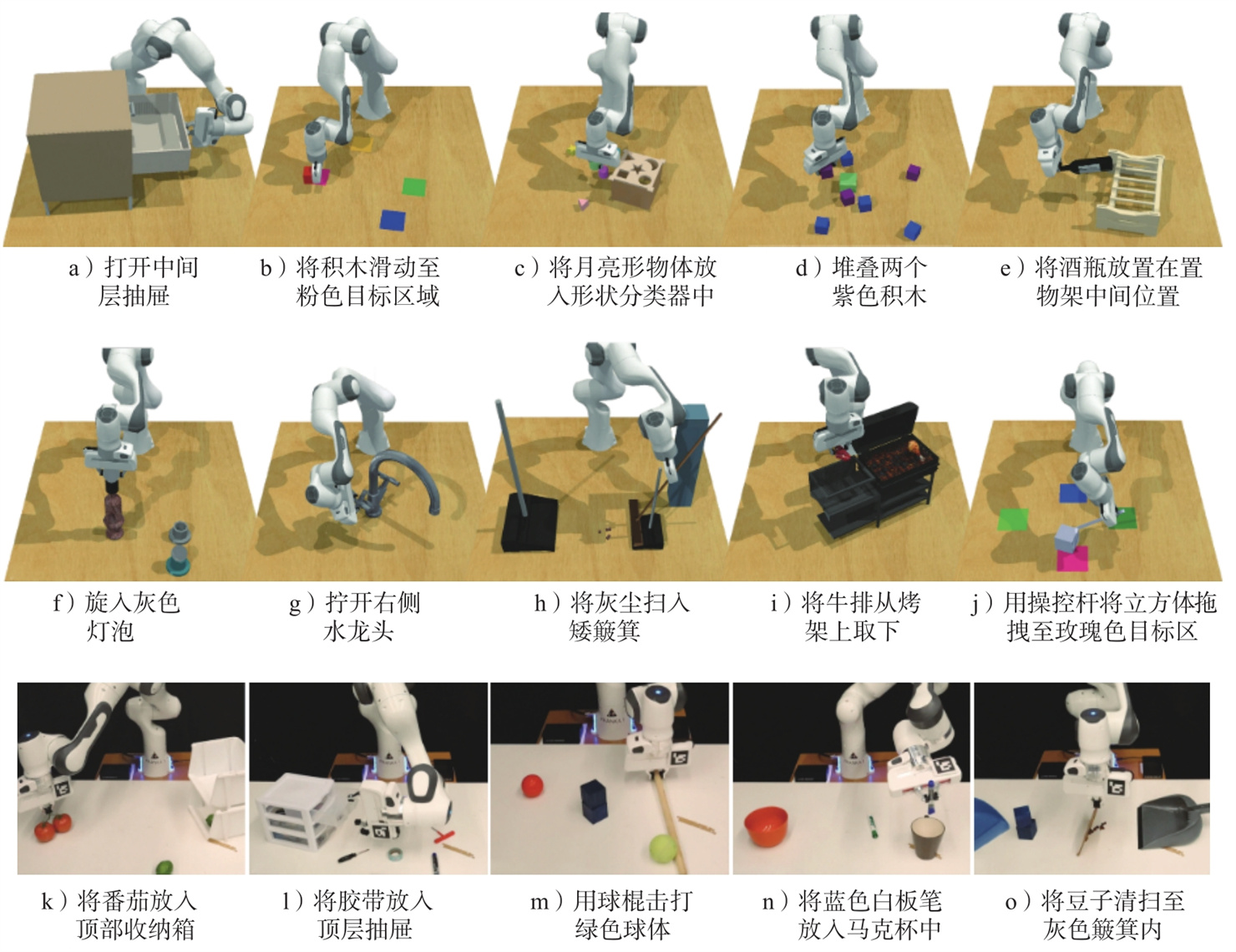
圖7-51 Perceiver-Actor
推薦閱讀
- 控制與決策系統(tǒng)仿真
- 數(shù)據(jù)挖掘?qū)嵱冒咐治?/a>
- Hands-On Cybersecurity with Blockchain
- 數(shù)據(jù)庫(kù)原理與應(yīng)用技術(shù)
- JSF2和RichFaces4使用指南
- 大數(shù)據(jù)平臺(tái)異常檢測(cè)分析系統(tǒng)的若干關(guān)鍵技術(shù)研究
- 自動(dòng)控制理論(非自動(dòng)化專業(yè))
- Windows Server 2003系統(tǒng)安全管理
- 內(nèi)模控制及其應(yīng)用
- Creating ELearning Games with Unity
- Visual Basic項(xiàng)目開(kāi)發(fā)案例精粹
- Effective Business Intelligence with QuickSight
- Windows 7故障與技巧200例
- Kubernetes on AWS
- PostgreSQL 10 High Performance