- 隨機分布控制系統的故障診斷與容錯控制
- 姚利娜
- 419字
- 2020-06-08 18:03:30
3.6 仿真實例
為了驗證故障診斷和容錯控制算法的有效性,給出如下系統進行計算機仿真。
選取如下B樣條基函數,即
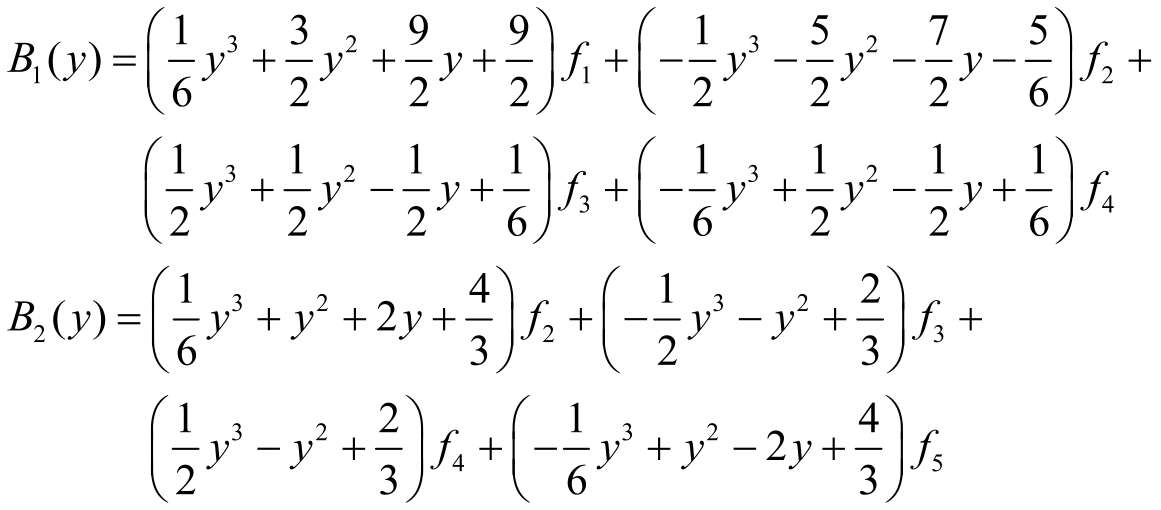
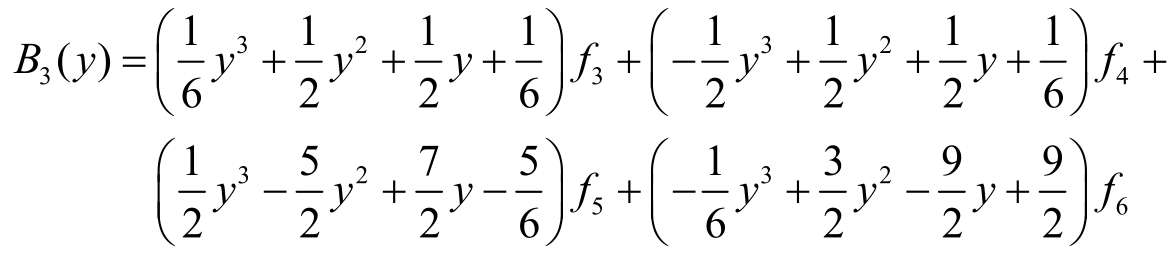
其中fi(i=1,2,3,4,5,6)是分段函數,給出如下定義。
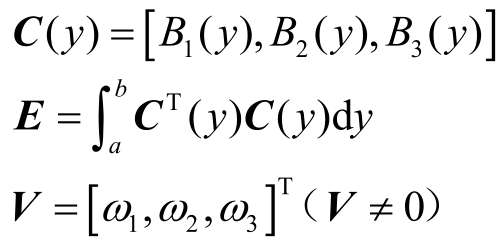
系統參數矩陣為
為了滿足式(3.12),選擇如下矩陣。

根據PB0=(ΣD)TM,求出如下矩陣。

為了方便設計容錯控制器,選取η=1,并且求出如下參數矩陣。
為了驗證算法,假定發生如下故障。
ρ (x,u)=[cos(0.8x(1)),0]T t≥5s
殘差信息的響應曲線如圖3-1所示,故障診斷結果如圖3-2所示。從圖3-1與圖3-2可以看出,故障診斷算法是有效的。
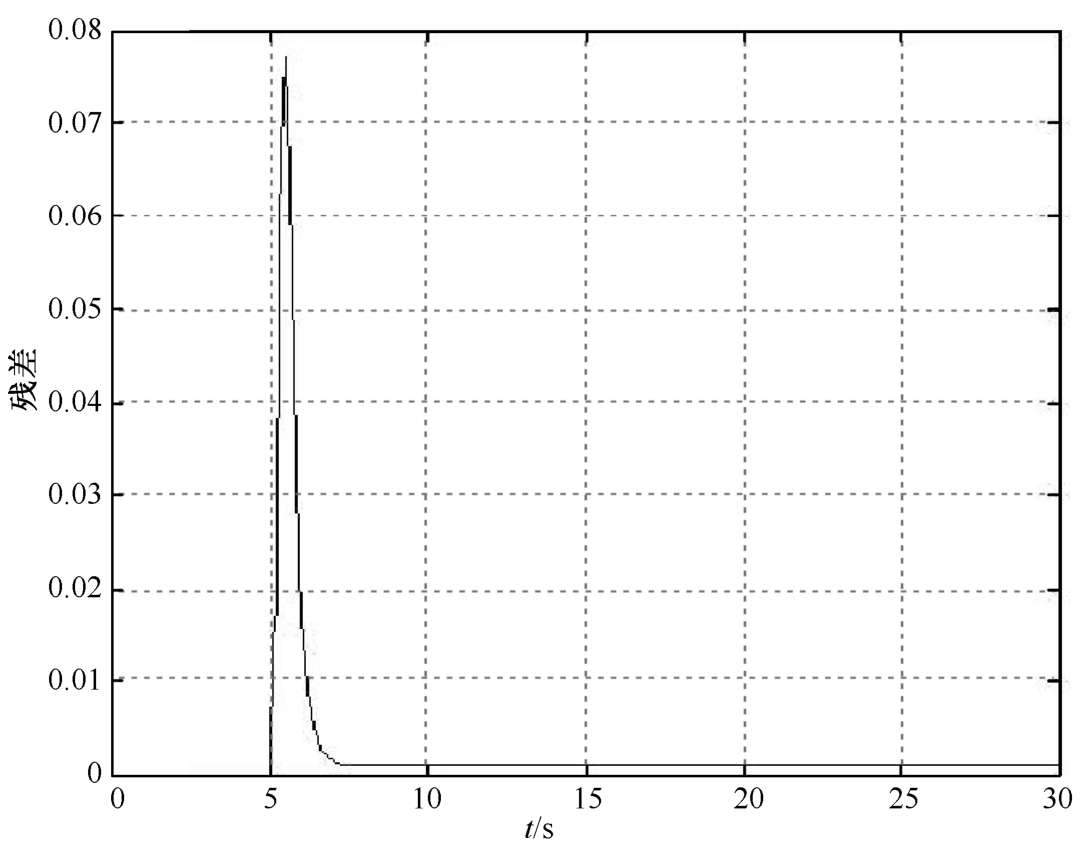
圖3-1 殘差信息的響應曲線
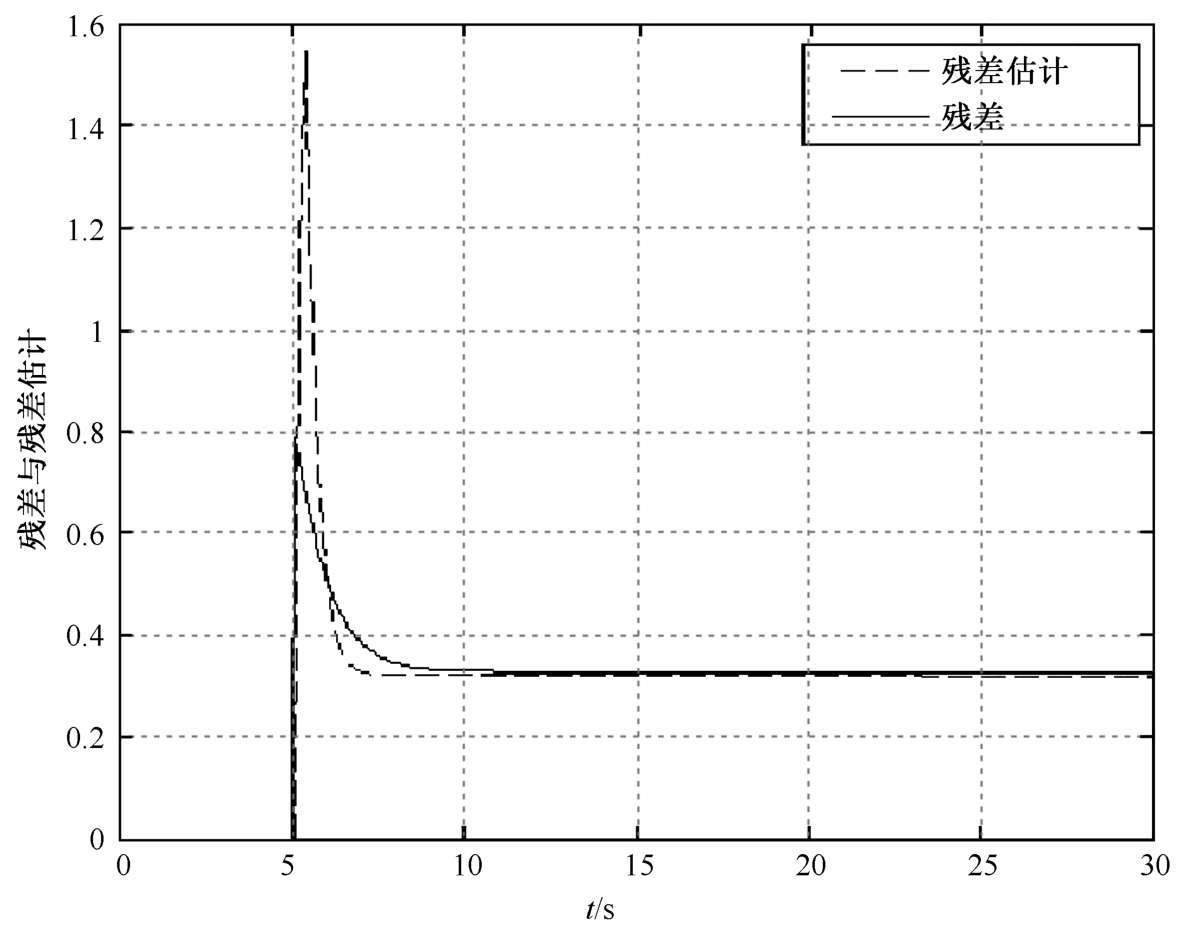
圖3-2 故障診斷結果
當系統無故障時,設計控制器使系統輸出PDF 3D圖像能夠跟蹤指定的PDF,如圖3-3所示。當系統在5s后發生故障時,按照式(3.44)重構控制器,系統輸出PDF 3D圖像如圖3-4與圖3-5所示。從圖3-4可以看出,在重構控制器的作用下,即使系統發生故障,系統的PDF仍能跟蹤給定的分布。
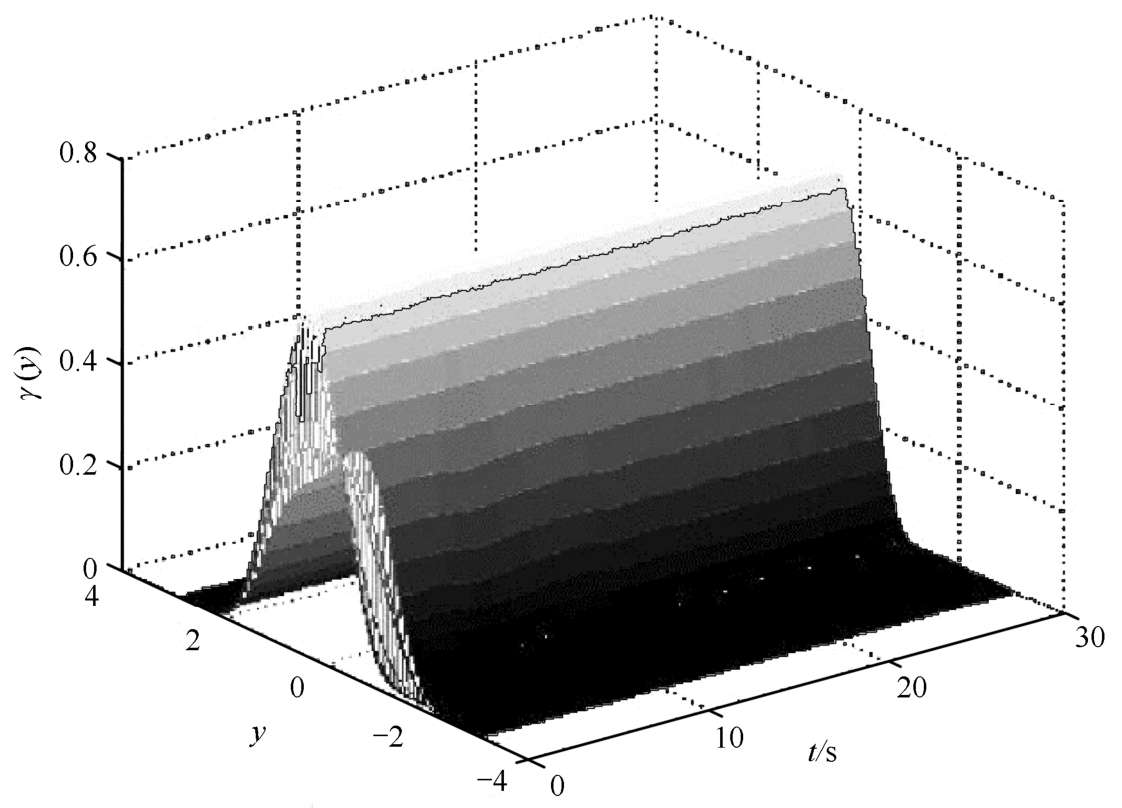
圖3-3 無故障系統的輸出PDF 3D圖像
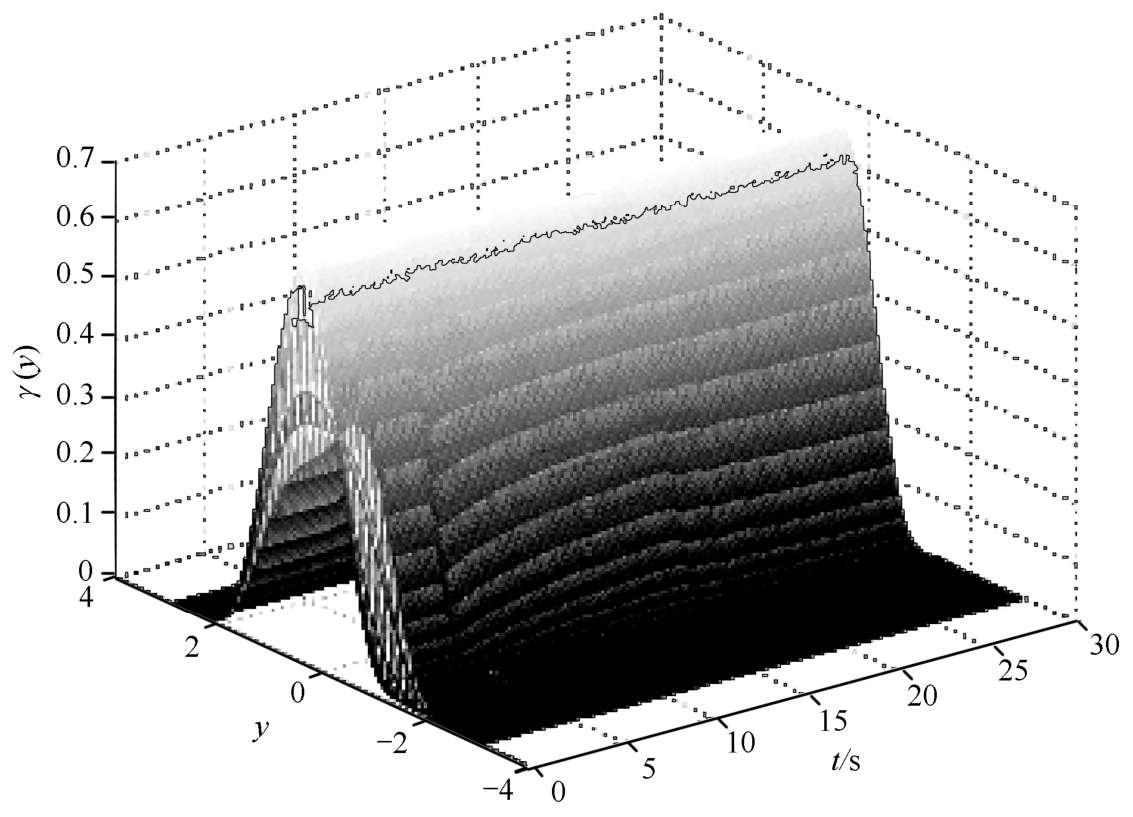
圖3-4 當發生故障不進行容錯控制時,系統的輸出PDF 3D圖像
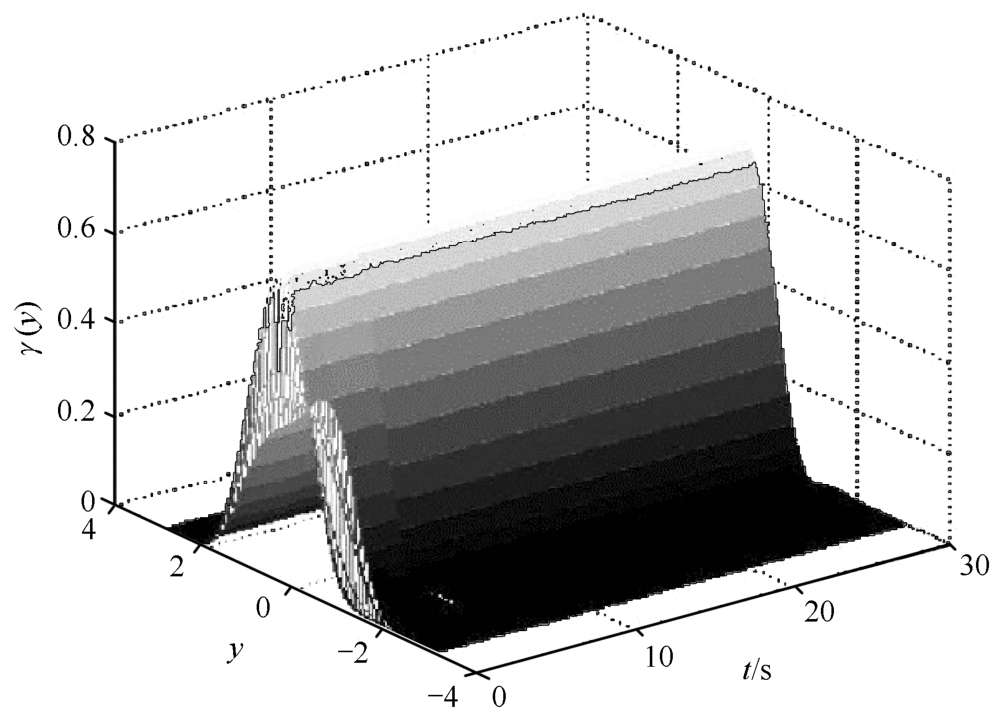
圖3-5 在容錯控制后,系統整個控制過程的輸出PDF 3D圖像
推薦閱讀
- Word 2003、Excel 2003、PowerPoint 2003上機指導與練習
- 人工智能超越人類
- Deep Learning Quick Reference
- Getting Started with Clickteam Fusion
- Hands-On Machine Learning on Google Cloud Platform
- Learning Apache Spark 2
- 模型制作
- 21天學通Java
- Android游戲開發案例與關鍵技術
- Grome Terrain Modeling with Ogre3D,UDK,and Unity3D
- 工業機器人維護與保養
- 計算機組網技術
- Hands-On Data Warehousing with Azure Data Factory
- 啊哈C!思考快你一步
- 工業機器人實操進階手冊