- 隨機分布控制系統的故障診斷與容錯控制
- 姚利娜
- 557字
- 2020-06-08 18:03:29
3.3 故障檢測
故障檢測的目的就是利用系統輸入、可測的狀態和系統輸出PDF的信息,檢測出系統發生的故障。為此構造檢測觀測器如下。
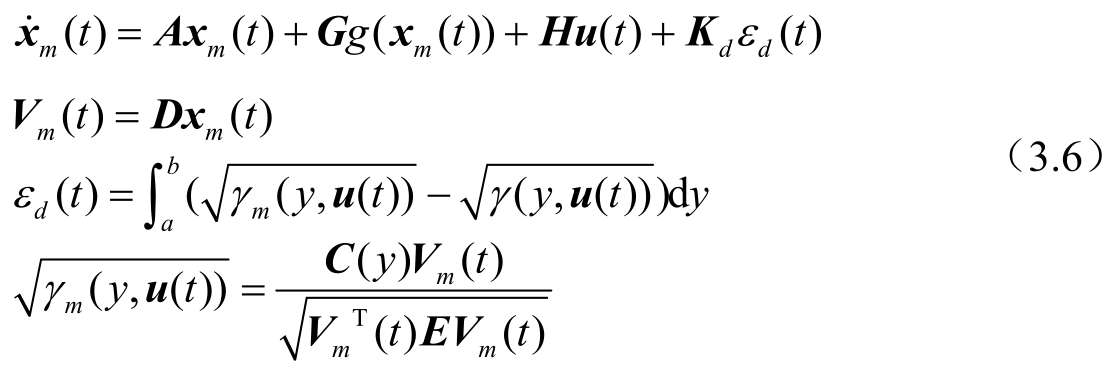
其中,xm(t)是檢測觀測器的狀態;Vm(t)是權值向量的估計;γm(y,u(t))是PDF的估計;Kd是觀測器的增益矩陣。εd(t)可表示為

其中, 。
。
因此,進一步得到

其中,ed=xm(t)-x(t)為狀態估計誤差。
引理3.1[6] 對于( ),存在一個λ(T1≤|λ|≤T2)使式(3.9)成立。
),存在一個λ(T1≤|λ|≤T2)使式(3.9)成立。

其中,T1=λmin(E)/λmax(E),T2=λmax(E)/λmin(E),根據式(3.1)、式(3.2)和式(3.6),可以得到誤差系統

其中, ,在無故障的情況下,結合引理3.1,由式(3.10)可進一步得到
,在無故障的情況下,結合引理3.1,由式(3.10)可進一步得到

其中,(A,Σ)是可觀測的,選取L使A+LΣD為Hurwitz矩陣。
定理3.1 在假設3.1的條件下,對于式(3.1)、式(3.2)和式(3.6),如果存在正定對稱矩陣P、Q滿足下列等式。

則狀態估計誤差ed是有界的。
證明 對于如式(3.11)所示的非線性誤差系統,可取二次型Lyapunov函數如下。

基于式(3.11),可以得到Lyapunov函數式(3.13)的一階導數為
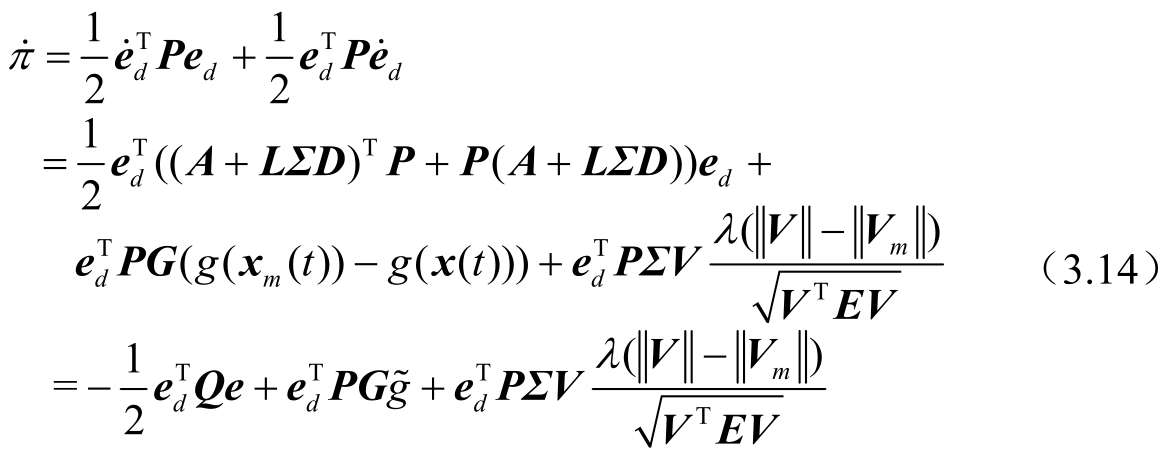
其中, 為非線性部分估計誤差。
為非線性部分估計誤差。
根據假設3.1和式(3.12),式(3.14)進一步得到
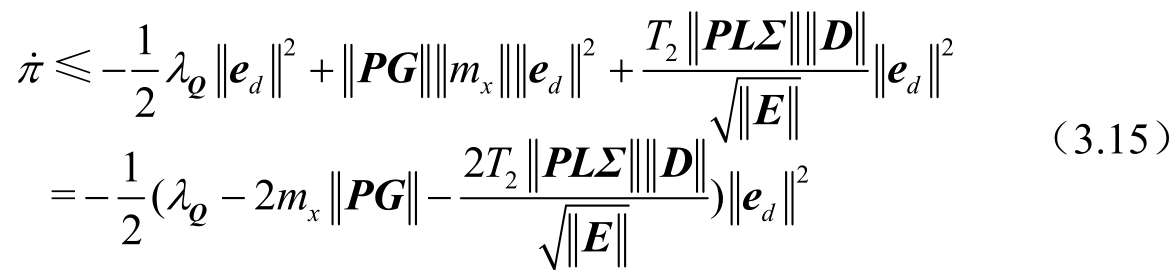
其中,λQ是正定對稱矩陣Q的最小特征值。
若滿足下列條件

當系統無故障時, ,則
,則 。這表明在系統無故障時由式(3.6)、式(3.11)和式(3.12)組成的觀測器系統是趨于穩定的。因此,當‖εd‖>τ時,系統發生了故障,其中τ是事先給定的閾值。
。這表明在系統無故障時由式(3.6)、式(3.11)和式(3.12)組成的觀測器系統是趨于穩定的。因此,當‖εd‖>τ時,系統發生了故障,其中τ是事先給定的閾值。
推薦閱讀
- 網頁編程技術
- Hands-On Machine Learning on Google Cloud Platform
- 數據庫原理與應用技術學習指導
- Mastering D3.js
- 工業機器人工程應用虛擬仿真教程:MotoSim EG-VRC
- 永磁同步電動機變頻調速系統及其控制(第2版)
- Windows環境下32位匯編語言程序設計
- Kubernetes for Serverless Applications
- Working with Linux:Quick Hacks for the Command Line
- 重估:人工智能與賦能社會
- 筆記本電腦電路分析與故障診斷
- 數據要素:全球經濟社會發展的新動力
- 工業機器人應用系統三維建模
- 大數據:從基礎理論到最佳實踐
- Microsoft Power BI Complete Reference