- 汽車動力學及底盤主動控制
- 丁能根 許駿編著
- 2722字
- 2020-05-07 09:56:18
1.4 發展趨勢
任何車輛控制系統的構成都包括三大組成部分,即控制器、傳感器和執行機構。后兩者在技術上可以解決,但對于作為控制系統關鍵的控制器,其控制算法實質是要尋求一個能夠為車輛提供良好性能的控制律。為此,需要將控制理論與車輛動力學緊密結合,且主要以計算機建模與仿真分析以及實時控制試驗為研究手段。隨著主動控制系統在車輛中應用的增加趨勢及各種功能控制系統集成程度的日益提高,車輛動力學在未來車輛控制系統設計中的作用將愈加重要。最近10年,人們在主動控制系統開發及其與被動車輛系統的動力學結合方面做了很多工作。在未來的發展中,這兩方面工作仍然會涉及并進一步加強。
1.4.1 主動控制
以主動懸架為例,從理論上講,采用主動懸架的車輛要想獲得滿意的控制律還要用到幾項技術。在設計控制器時,一般對車輛的行駛條件都采用了一些假設并限定了其范圍。然而在現實中的路面粗糙度、路面不平度輸入、車速、制動力或驅動力等因素可能在較大范圍內變化,因此控制器設計時需要考慮穩定性和自適應問題。也就是說,在保證系統穩定的前提下,控制器可在線地自調節以適應當前特定的運行條件。這就需要更深入的基礎性工作,把先進的控制理論運用到車輛動力學設計中去。
研究表明,利用“軸距預瞄”信息可以提高后輪處的懸架性能,而這種軸距預瞄信息基于一個前提,即后輪的輸入與前輪輸入相同,只是時間上存在著一個滯后。假如我們將這一概念進一步擴展,即在車輛前部安裝一個前視預瞄傳感器,來提供關于前輪前方路面輸入的可靠信息,控制系統就可同時利用車輛前后輪的路面預測信息進行控制,這一控制方式稱為“預瞄控制”。然而,預瞄控制的潛力尚有待于進一步研究,以判斷開發這種傳感器的實際價值。已有的一些研究結果顯示,在前輪前方0.8~1m處前保險杠上安裝傳感器,能夠獲得滿意的車輛性能改善效果,并具有可接受的性價比。
液氣懸架的商業前途已得到人們的普遍認可,但實際中的一些約束條件限制了有限帶寬主動懸架系統的市場開發。按其重要程度大致排列是,造價,能耗,增加的質量,安全性或可靠性。若想在今后幾年內取得重大的發展,還需要在電液閥技術方面有大的突破來降低成本。一些功能相對較差而造價低得多的可控子系統將繼續得到汽車廠商的關注,包括連續可調阻尼系統、側傾控制系統和車高控制系統。實際上,如果能夠將這3個子系統很好地結合使用的話,其共同完成的功能與一個有限帶寬主動系統不相上下,但造價和能耗卻可能低很多。
最后,探討控制系統集成這個大范圍的問題。控制系統已經在一些方面(如防抱死、牽引力控制等)得到了很好的應用,并且正在向其他方面拓展,如可切換阻尼器、側傾控制、四輪轉向等。這些系統最初只限于各自完成某一特定的功能,但它們遲早會結合起來。雖然這里我們并未涉及防抱死制動系統(ABS)和牽引力控制系統(TCS)等,但顯然這些底盤系統通常相互關聯,且相互作用。比如,通過垂向的輪胎動載荷影響,ABS或TCS必然要和主動懸架控制發生聯系;又比如,車輛在對開路面(兩邊摩擦系數不同的路面)制動時,通過ABS對縱向力的控制可以與采用4WS對橫向力的控制共同作用,以保證橫擺力矩的穩定,提高車輛行駛安全性。因此,在車輛動力學領域中,對于這些控制系統的集成研究不僅必要,而且必需,同時也為未來的車輛動力學研究者留下了一個新的挑戰。
1.4.2 整體底盤控制
作為車輛和道路之間的界面,輪胎和底盤對于行駛安全和舒適性起著決定性的作用,對于這個界面進行優化也就是我們未來最重要的項目。整體底盤控制項目將制動系統、懸架系統、轉向系統和輪胎集成為智能底盤,如圖1-7所示。整體底盤智能控制的中央計算機根據傳感器數據對行駛狀態進行評估,通過各系統的相互協調,確保所有路況下都能獲得更好的安全性、舒適性和駕駛樂趣。整體底盤智能控制與傳統底盤有以下區別。在彎道較多的山路行駛時,駕駛員要不斷轉向,整體底盤智能控制可大大改善對車輛的操縱,主動底盤使擺動減到最小,可變轉向比使轉向更輕松,這樣,駕駛員可輕易完成彎道的行駛。道路上的濕樹葉對于高速行駛來說不成問題。傳感器獲得有關各車輪附著力的數據,主動轉向開始工作,以避免甩尾。主動底盤使車輛保持穩定,駕駛員在任何時候都能控制情況。在不同附著系數路面全制動時,傳統車輛的駕駛員必須不斷對轉向進行校準以保持車道,這導致制動無法達到最高效率,進而延長了制動距離。主動轉向緩解了可轉向性和制動距離的矛盾,使車輛自動保持方向穩定性,使駕駛員的轉向操縱減至最少,并能將制動距離縮短15%~20%。
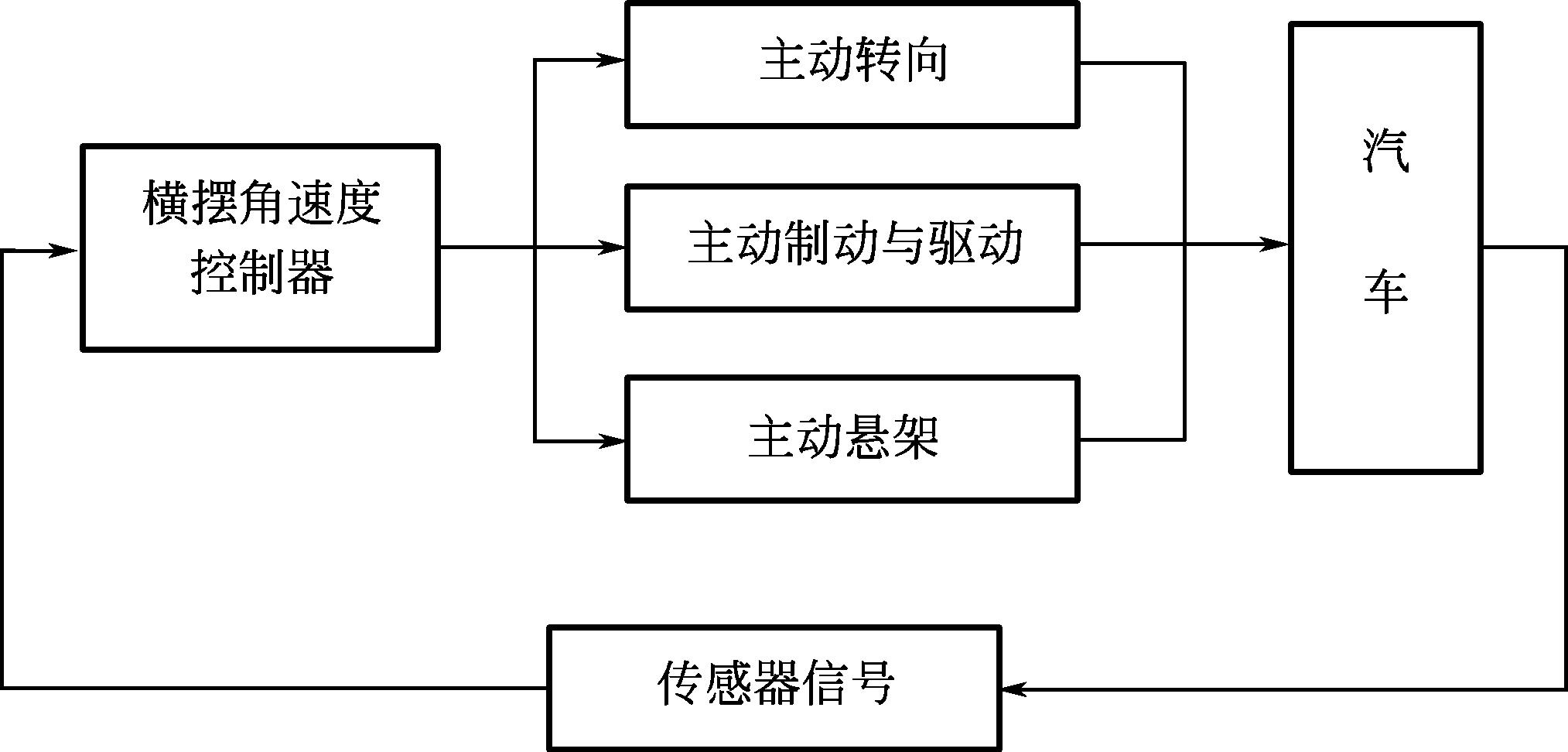
圖1-7 集成的底盤操縱穩定性控制
1.4.3 車輛動力學
成熟的車輛模型和與之有關的功能強大的軟件包都已經在汽車工業界得到廣泛應用。將在第5章中以車輛平順性的仿真分析為例,介紹車輛多體系統動力學建模及有關分析軟件的應用。
近年來發展起來的多剛體系統動力學,其基本計算方法是,首先對一個由不同質量和幾何尺寸組成的系統施加一些不同類型的連接元件,從而建立起一個具有合適自由度的模型,然后軟件包會自動生成相應的時域非線性方程,并在給定的系統輸入下進行求解。
其實,不管實際的系統方程組有多么復雜,都可以寫成一個形式,即
 (1-1)
(1-1)
式中 M——系統參數矩陣,包括質量、慣量、剛度、阻尼、幾何尺寸等;
X——系統變量構成的向量,它可能包含幾百個變量;
F——所有外力的矩陣。
在此需要特別指出,假如F中還包括一些不確定因素的話,那么花很大的精力去提高方程式左邊MX的精度,也是沒有意義的。例如,在操縱動力學模型中,F矩陣包括的輪胎作用力恐怕就是最不精確的部分。因此,不斷努力地對輪胎性能進行測量、提煉和建模將成為車輛動力學發展的一個核心問題。
回顧行駛動力學和操縱動力學的發展,可以清楚地看到,車輛動力學中一些更為微妙的因素未必能夠通過建模來預測,但在主觀評價中,這些因素卻很容易被有經驗的實驗工程師發現。目前,人們普遍承認,在對車輛行駛和操縱性能的開發、調節、以至最后形成批量生產決策時,仍以主觀評價為基礎。也許我們會問,既然功能強大的計算機軟件能如此有效地模擬日益復雜的車輛模型,我們又何必仍然依賴于經過精確“標定”的試驗工程師們精湛技能呢?對這個問題,或許可以從兩方面來回答。首先,這些模型雖不“完美”,但并不意味著它們沒有用處,比起以往的那種反復實車試驗的做法,任何加速開發設計進程的分析工具都肯定有用。其次,如果我們在建模時把精力都集中在模型的復雜性和精確度方面,就有可能搞錯了其主次關系。我們對車輛性能的客觀測量和主觀評價之間復雜的關系還缺乏了解,而車輛的最終用戶是駕駛員或乘客,是他們最終決定著對行駛振動的被動反應以及對車輛操縱行為的主動控制。因此,對車輛動力學研究者來說,今后一個重要的研究領域就是對這些主觀與客觀之間關系的認識問題。