- 網絡化分布式系統預測控制
- 李少遠 鄭毅 薛斌強
- 1276字
- 2020-04-30 19:07:10
2.3 具有兩通道丟包的網絡化系統的滾動時域狀態估計
上一節分析了反饋通道即傳感器至控制器之間存在數據包丟失的狀態估計問題,并設計了滾動時域的狀態估計器以及給出了其估計性能的收斂條件。但是,上一節僅考慮了傳感器至控制器之間存在數據包丟失的情況,并沒有考慮前向通道(即控制器至被控對象之間)的數據包丟失。因此,本小節針對兩通道同時存在數據包丟失的情況,深入研究網絡化控制系統的狀態估計問題。
2.3.1 問題描述
本小節將討論前向通道與反饋通道同時存在數據包丟失的遠程被控對象的狀態估計問題。為了這一研究目標,建立一個典型網絡化控制系統,如圖2-11所示。由圖可知,NCSs由傳感器、不可靠共享網絡、估計器、控制器和被控對象組成。考慮如下離散時間線性時不變系統:


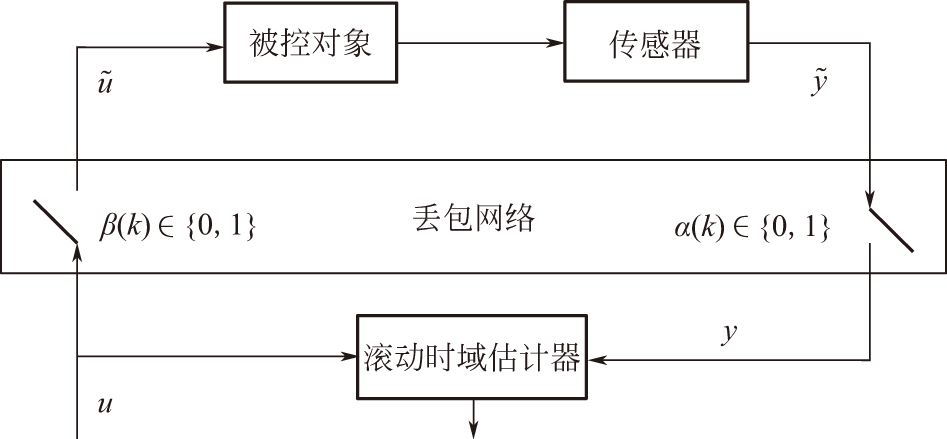
圖2-11 具有多丟包的網絡化控制系統


2.3.2 網絡化滾動時域狀態估計器設計








2.3.3 估計器的性能分析








2.3.4 數值仿真
為了驗證本節所提出的滾動時域估計方法的有效性,給出了在真實網絡環境下具有多數據包丟失的網絡化控制系統,并在此基礎上搭建了一個實時仿真實驗平臺。其中,實驗平臺由計算機、被控對象和兩個如圖2-12所示的ARM 9嵌入式模塊組成。這兩個模塊分別用于控制器端與被控對象端,并且通過一個IP網絡與它們連接,其中通信協議采用UDP協議。有關ARM 9嵌入式模塊的具體描述可以參考文獻[18]。首先,考慮如下由狀態空間描述的被控對象,其中采樣時刻為0.1s,以及


圖2-12 ARM 9嵌入式模塊
如圖2-13所示,這個實時仿真實驗是在計算機Matlab/Simulink環境下實現。其結構框架可分為控制器部分與被控對象部分。其中,模塊Netsend和模塊Netrecv分別表示基于UDP協議的發送器和接收器,用于發送和接收數據包。系統輸出信號與控制器輸出信號分別經由兩個IP地址為192.168.0.201和192.168.0.202的校園內網進行數據的傳輸。總之,整個實時仿真實驗的步驟可由如下描述:第一,安裝與ARM 9嵌入式模塊相對應的軟件以及連接相關的硬件設備;第二,基于仿真實驗結構圖2-13,在Matlab/Simulink環境下搭建相應的Simulink模塊圖(如圖2-14所示),并加以調試及運行;最后,在一個人機交互界面上監測實時數據,并收集和處理所需要的數據(如圖2-15所示)。
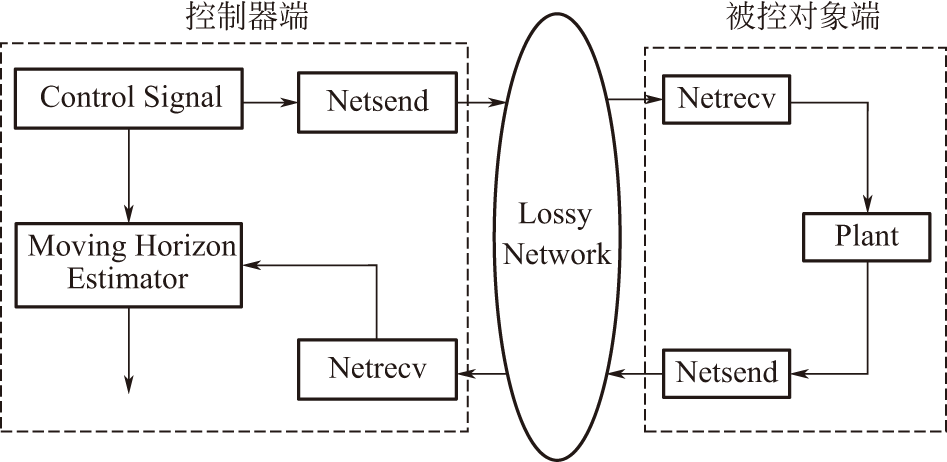
圖2-13 仿真實驗的結構圖
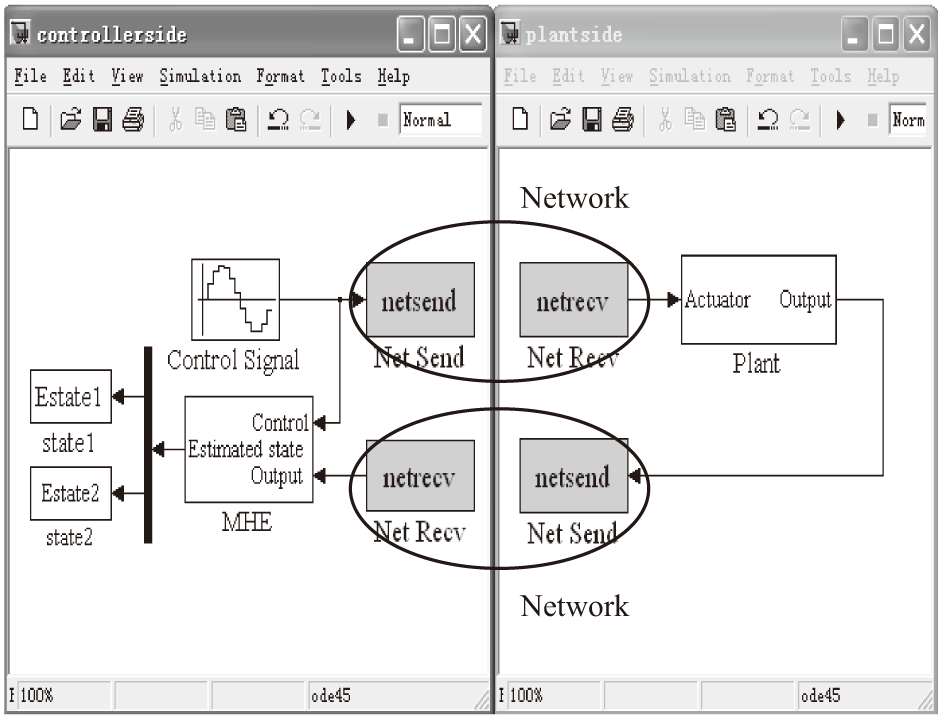
圖2-14 仿真實驗的Simulink模塊
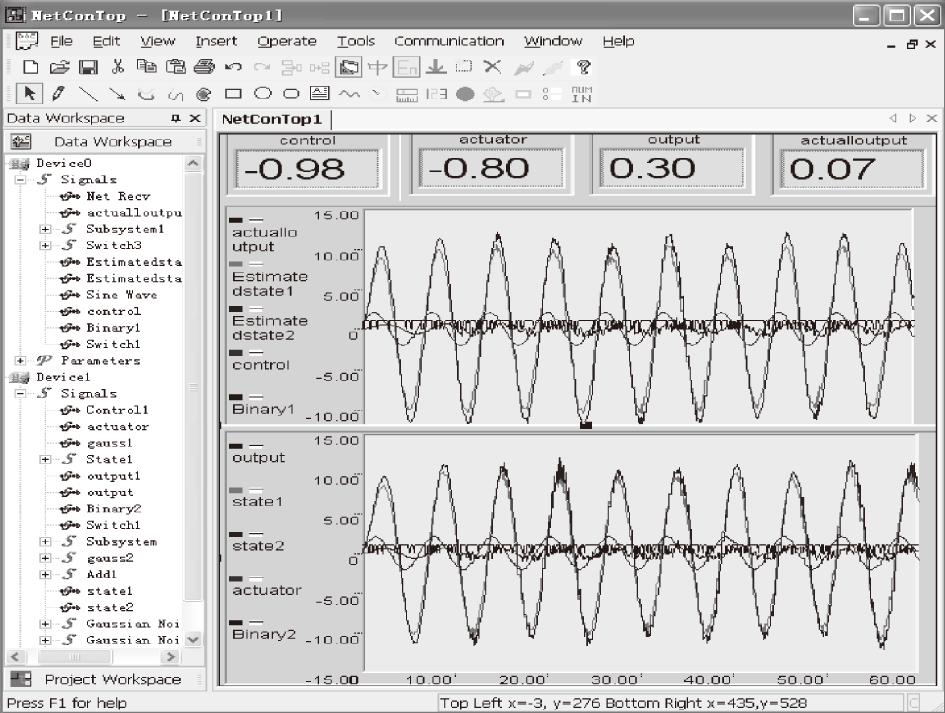
圖2-15 可視化監控界面

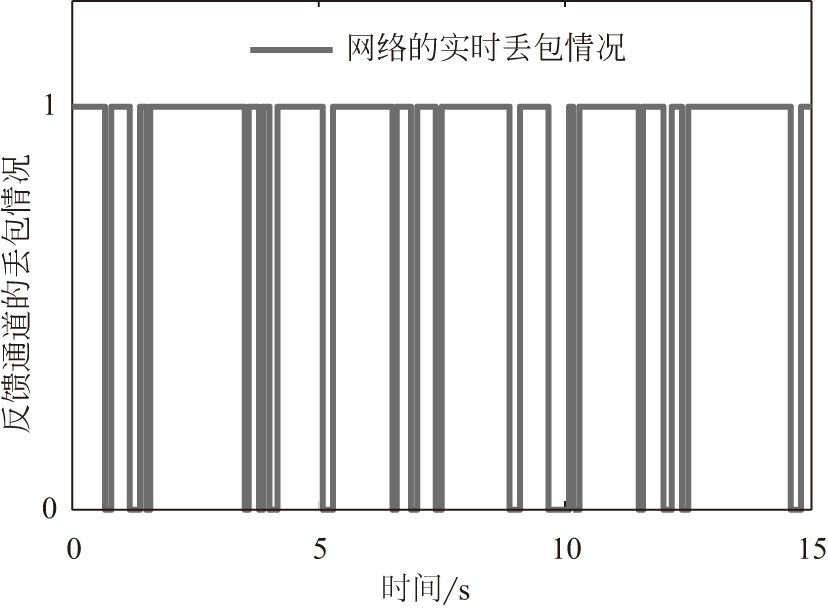
圖2-16 反饋通道的丟包狀況
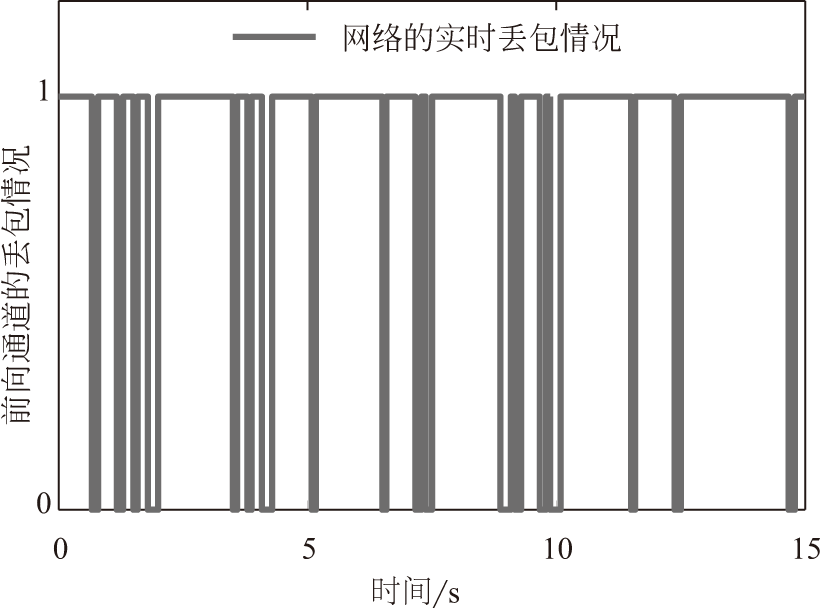
圖2-17 前向通道的丟包狀況

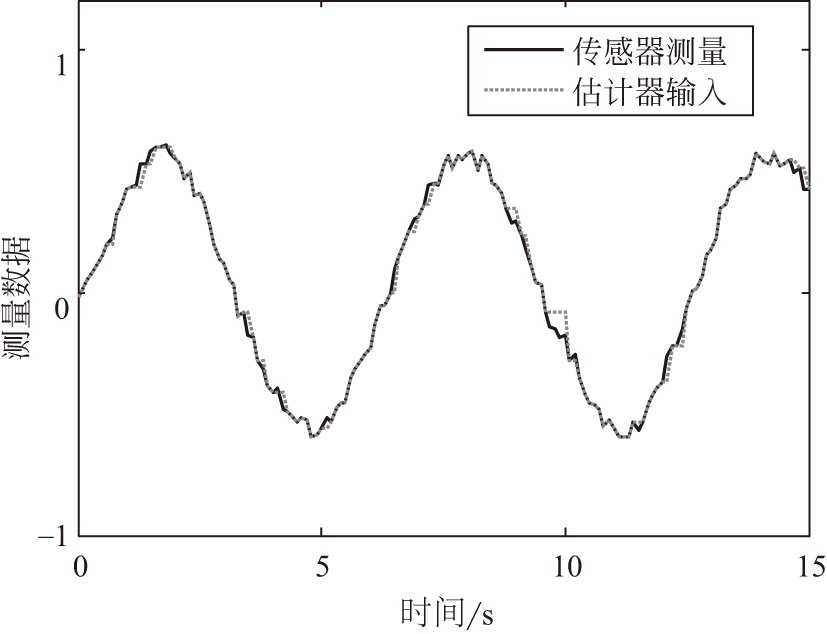
圖2-18 丟包對測量數據的影響
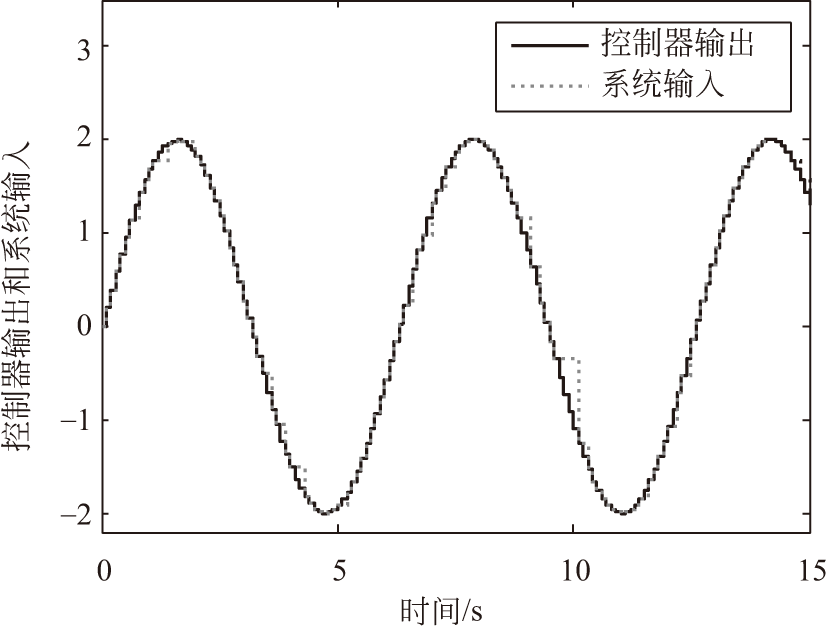
圖2-19 丟包對控制信號的影響
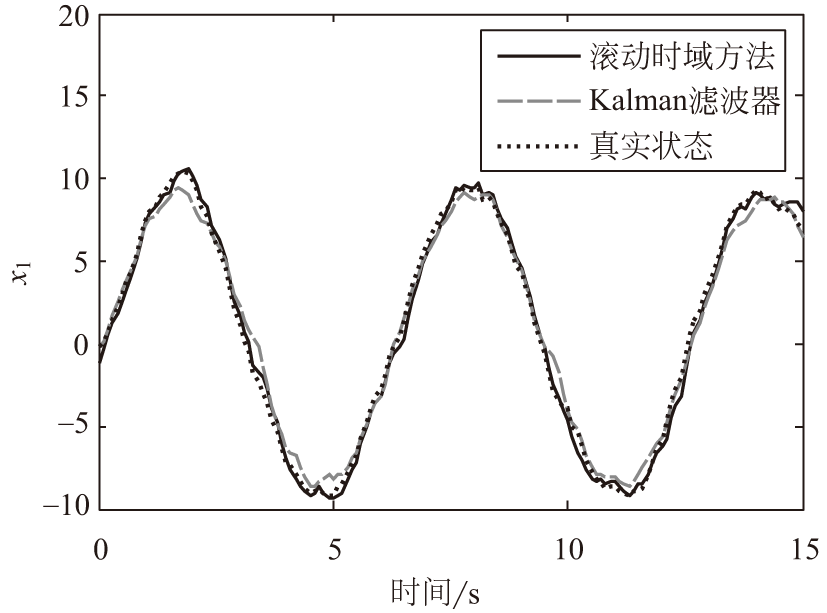
圖2-20 關于狀態x1的方法比較
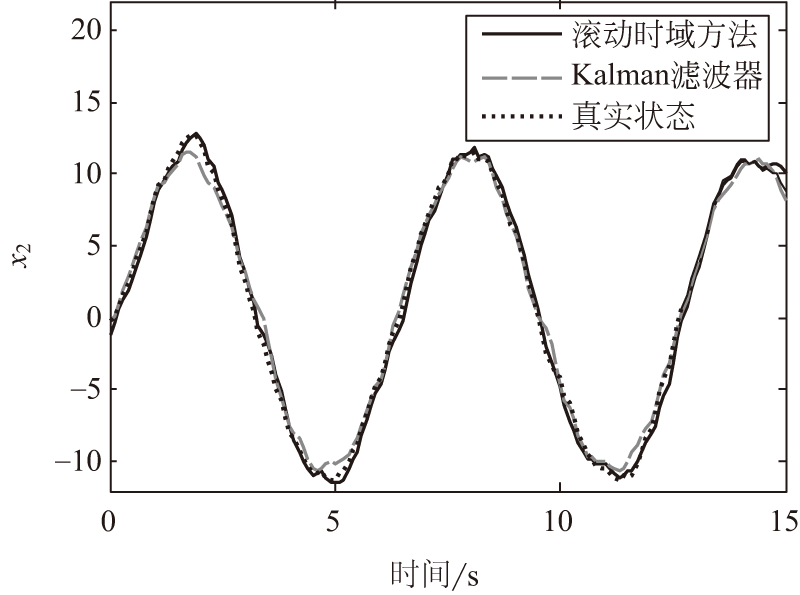
圖2-21 關于狀態x2的方法比較
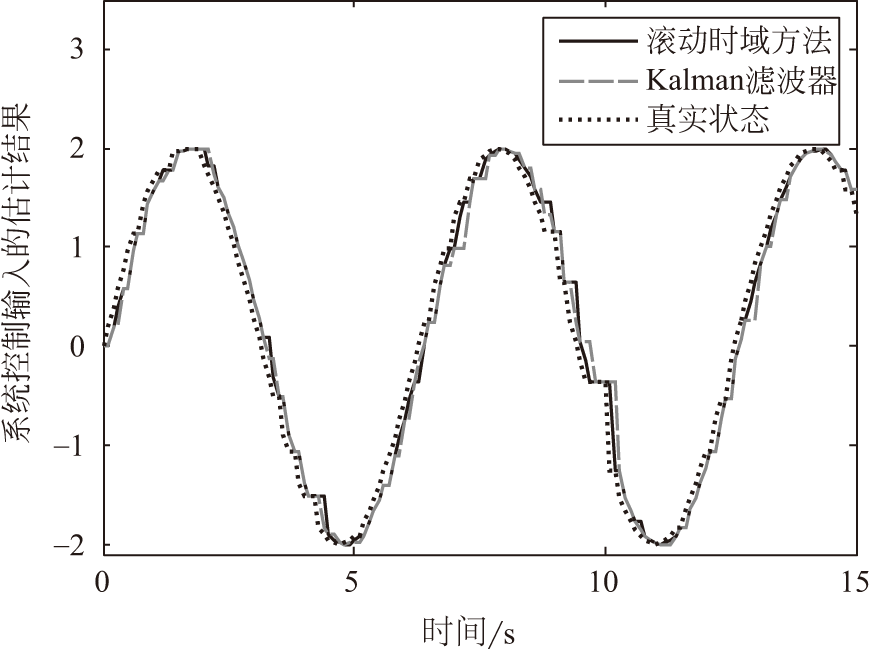
圖2-22 關于控制輸入的方法比較
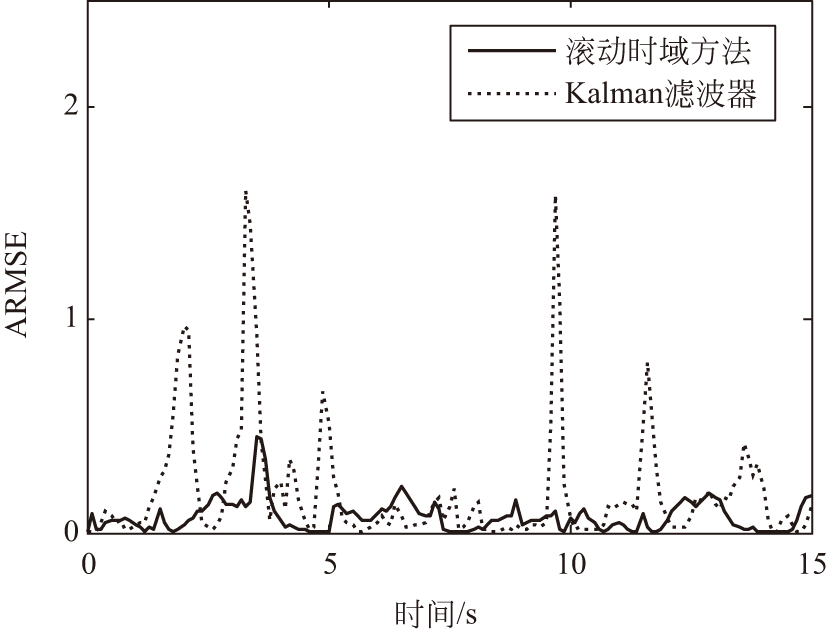
圖2-23 關于ARMSE的方法比較
最后,圖2-24給出了狀態估計誤差期望的歐氏范數與其上界函數(2-53)的比較結果,其中,實線表示估計誤差期望的歐氏范數軌跡,點畫線表示含有系統噪聲時估計誤差期望的歐氏范數的上界函數,而虛線表示不含系統噪聲時估計誤差期望的歐氏范數的上界函數。同時,由圖可以看出:含有系統噪聲時估計誤差期望的歐氏范數的上界函數隨著時間的推移收斂至穩定值,即表征了估計性能的有界性,而不含系統噪聲時其上界函數收斂至零,即說明了估計性能的無偏性。另外,從圖還可以看到:估計誤差期望的歐氏范數一直在其上界函數的范圍內變化。這樣,該仿真結果不僅表明了所設計的滾動時域估計器具有良好的估計性能,還驗證了上述關于估計性能分析所得結論的正確性。
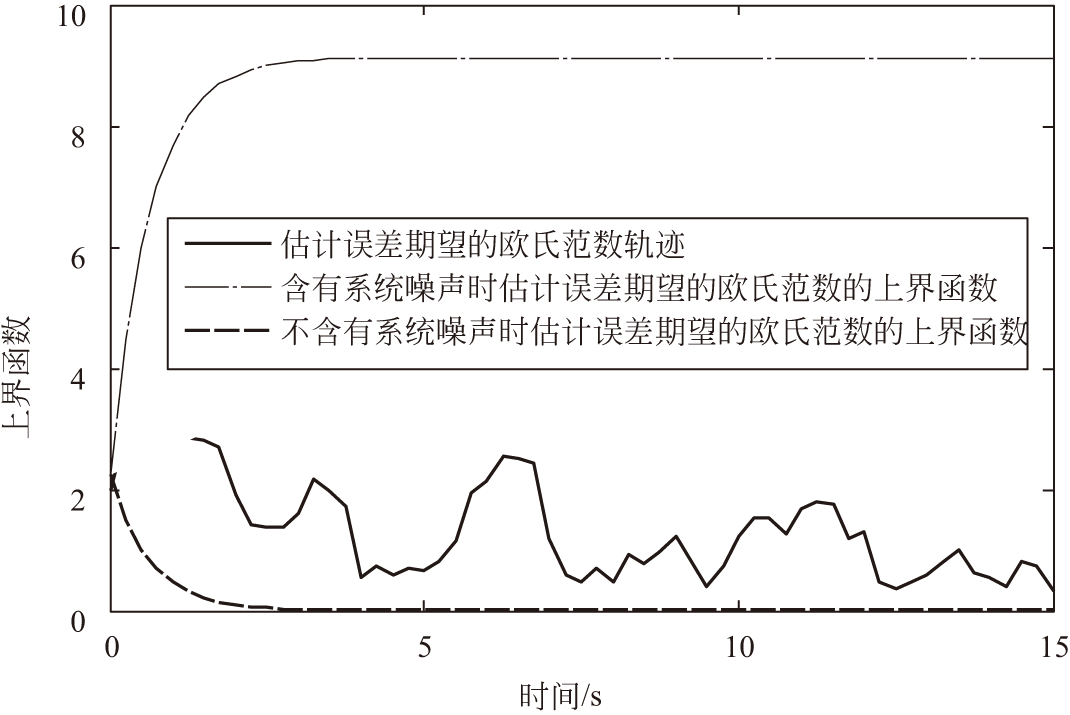
圖2-24 估計誤差期望的歐氏范數與其上界函數