- 汽車傳感器識別·檢測·拆裝·維修(雙色圖解精華版)
- 姚科業(yè)
- 2263字
- 2019-01-04 20:43:00
第六節(jié) 方向盤轉角傳感器
一、方向盤轉角傳感器的作用和安裝位置
1.作用
方向盤轉角傳感器主要用于車輛穩(wěn)定控制系統(tǒng)、電子助力轉向系統(tǒng)和電子懸掛系統(tǒng)中,用于檢測轉向盤的中間位置、轉動方向、轉動角度和轉動速度等轉向信息,從而使相關控制單元實施不同的控制策略。
2.安裝位置
早期的方向盤轉角傳感器主要安裝在轉向軸管上來檢測轉向軸的旋轉角度,現(xiàn)今的方向盤轉角傳感器,一般與時鐘彈簧集成安裝。
二、光電式方向盤轉角傳感器
1.結構
光電式方向盤轉角傳感器的角度的測量是通過光柵原理來實現(xiàn)的。它由光源、編碼盤、光學傳感器和計數(shù)器組成,結構如圖2-81所示。編碼盤由兩個環(huán)構成,一個是絕對環(huán),一個是增量環(huán)。每個環(huán)由兩個傳感器進行掃描。
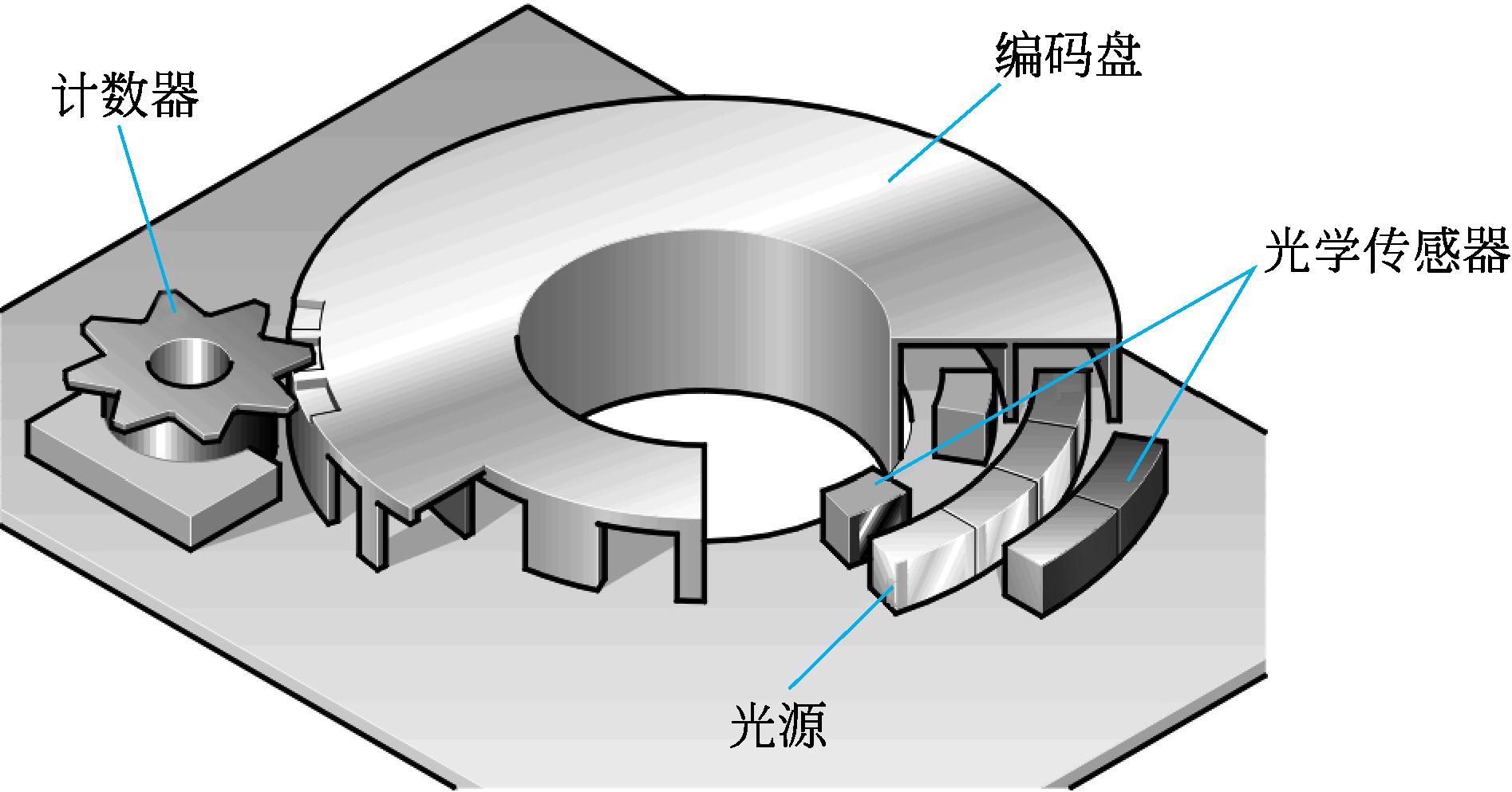
圖2-81 光電式方向盤轉角傳感器結構
2.工作原理
當光源被遮住,傳感器輸出電壓為“0”,如圖2-82(a)所示;當光透過縫隙照到傳感器上,傳感器輸出電壓為“1”,如圖2-82(b)所示。
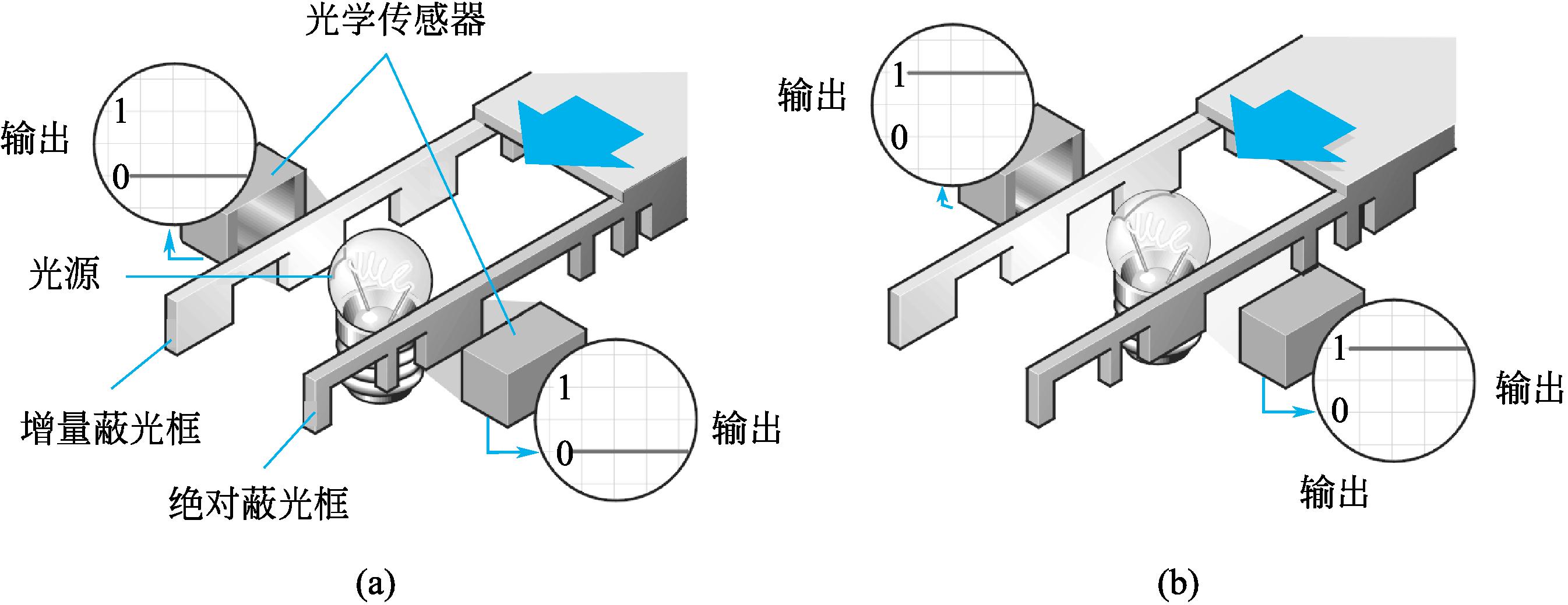
圖2-82 傳感器信號輸出
如果移動蔽光框,就會產生兩個不同的電壓,如圖2-83所示。增量傳感器傳送一個均勻的信號,這是因為間隙是均勻分布的;絕對傳感器傳送一個不均勻信號,這是因為間隙是不均勻分布的。系統(tǒng)通過對比這兩個信號,就可計算出蔽光框移動的距離,于是就確定了絕對部件運動的起始點。
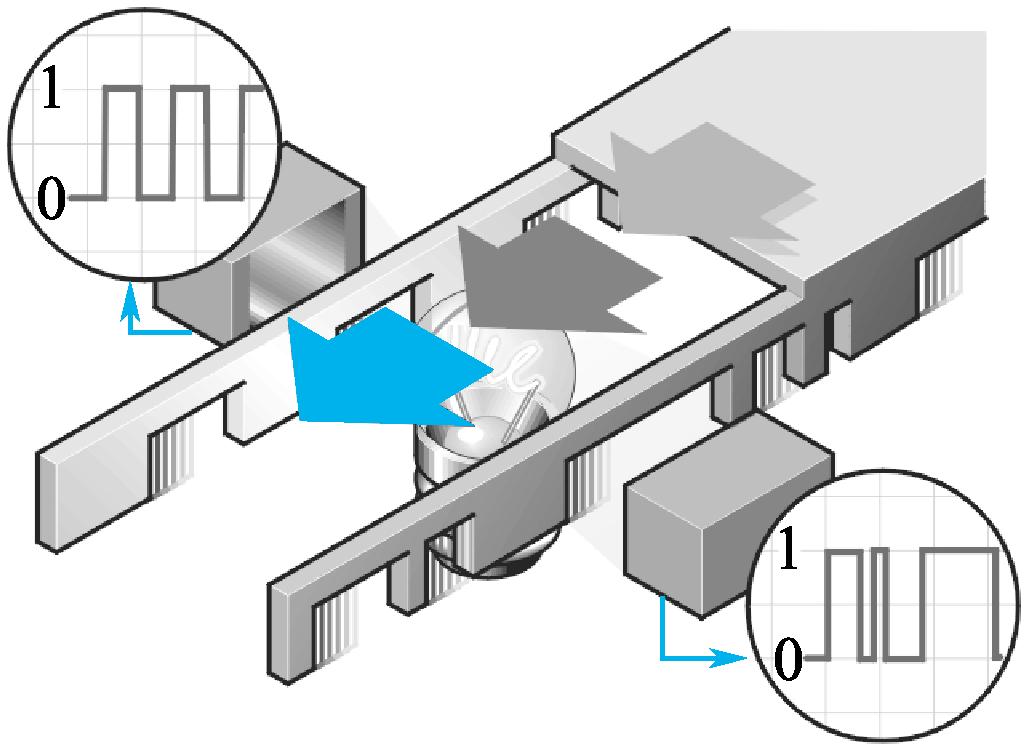
圖2-83 光電式方向盤轉角傳感器工作原理
三、滑動電阻式方向盤轉角傳感器
滑動電阻式方向盤轉角傳感器與線性節(jié)氣門位置傳感器工作原理相同,在電阻器的兩端供給5V直流電壓,一個滑動接觸點隨著方向盤的轉動在電阻器兩端內運動,方向盤轉動到兩個端點位置時,滑動接觸點剛好運動到電阻器兩端。測量接觸點和電阻器一端的電壓即可求得方向盤的絕對轉角位置。
還有的方向盤轉角傳感器采用雙滑動電阻的兩路輸出電壓信號,傳感器由兩個相差90°精密電位滑環(huán)組成,除了用于判斷方向盤的旋轉方向外,這兩路輸出電壓信號還可相互補充,實現(xiàn)出錯診斷。
由于電阻分壓式絕對值轉角傳感器是接觸式傳感器,在滑動觸點和電阻器的相互運動過程中,二者會產生磨損,影響了傳感器的使用壽命。
滑動電阻式方向盤轉角傳感器的檢測方法可以參考節(jié)氣門位置傳感器的檢測方法。
四、磁感應式方向盤轉角傳感器
磁感應式方向盤轉角傳感器由齒盤、永久磁鐵、兩個感應線圈及信號處理電路等組成,如圖2-84所示。
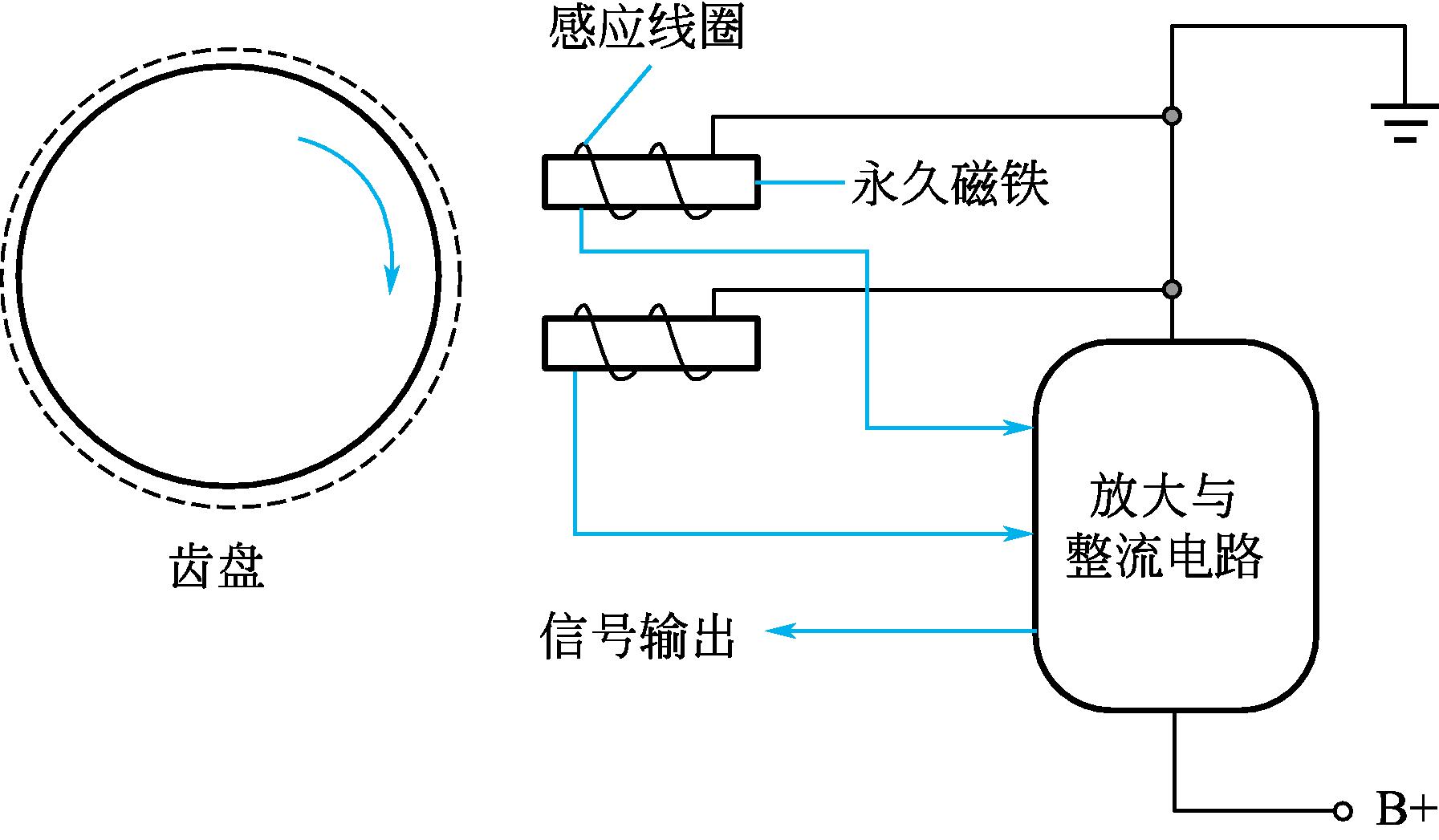
圖2-84 磁感應式方向盤轉角傳感器的原理
當齒盤隨轉向軸轉動時,感應線圈就會產生交變的感應電動勢,經信號處理電路放大、整流及整形后輸出。控制器根據(jù)傳感器輸入的信號脈沖個數(shù)就可確定方向盤的轉角,設置兩個感應線圈的目的同樣是為了控制器判斷左右轉向的需要。
磁感應式方向盤轉角傳感器可以用測量電阻的方法來檢測。
五、霍爾式方向盤轉角傳感器
東風標致307使用了霍爾式方向盤轉角傳感器,霍爾式方向盤轉角傳感器是利用遮蔽轉盤旋轉時遮蔽或通過磁場,使霍爾元件產生或不產生霍爾電壓的辦法來計量轉向角度的大小,其原理與使用遮蔽板的霍爾式曲軸位置傳感器相似,其結構如圖2-85所示。方向盤轉角傳感器插接器有四個端子:一個為12V供電端子,一個為搭鐵端子,另兩個端子分別是方向盤轉動信號S1和S2的信號端子。
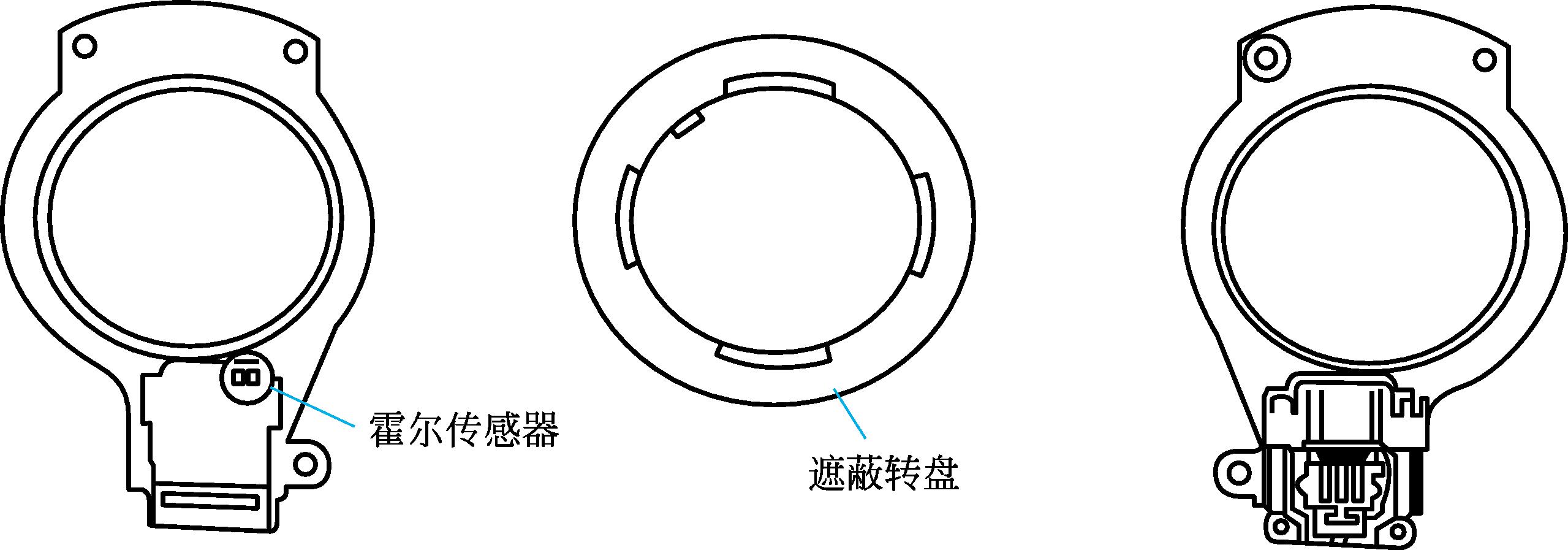
圖2-85 霍爾式方向盤轉角傳感器的結構
方向盤角度信息以兩個方波信號(圖2-86)傳給助力轉向GEP控制單元,GEP控制單元通過這兩個信號確定方向盤轉動的速度和方向。兩個霍爾式傳感器從相位上錯開90°±30°,能夠確定方向盤的旋轉方向,轉向時,控制器可根據(jù)S1信號和S2信號的相對位置確定旋轉方向,其檢測方法也可參照光電式方向盤轉角傳感器來進行。
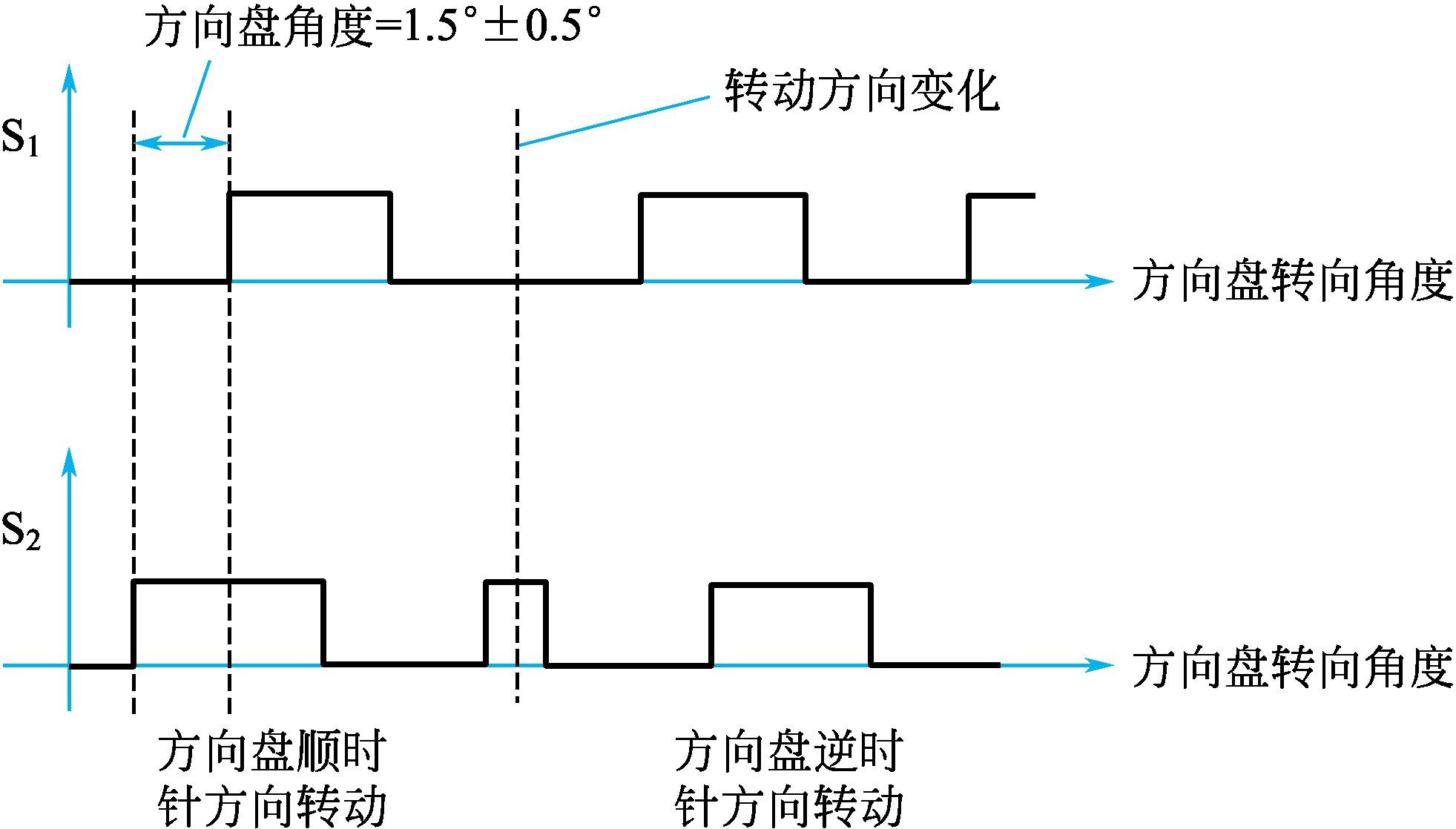
圖2-86 輸出脈沖信號圖
六、各向異性磁阻式方向盤轉角傳感器
磁性薄膜在平行于膜面的外磁場作用下達到飽和磁化時,薄膜的電阻率將隨外磁場方向和電流方向的變化而變化,這種效應就是各向異性磁阻(Anisotropic Magneto Resistance,AMR)效應。
1.結構
別克榮御ESP系統(tǒng)中使用了各向異性磁阻式方向盤轉角傳感器,方向盤轉角傳感器位于方向盤下面,其內部結構如圖2-87所示。
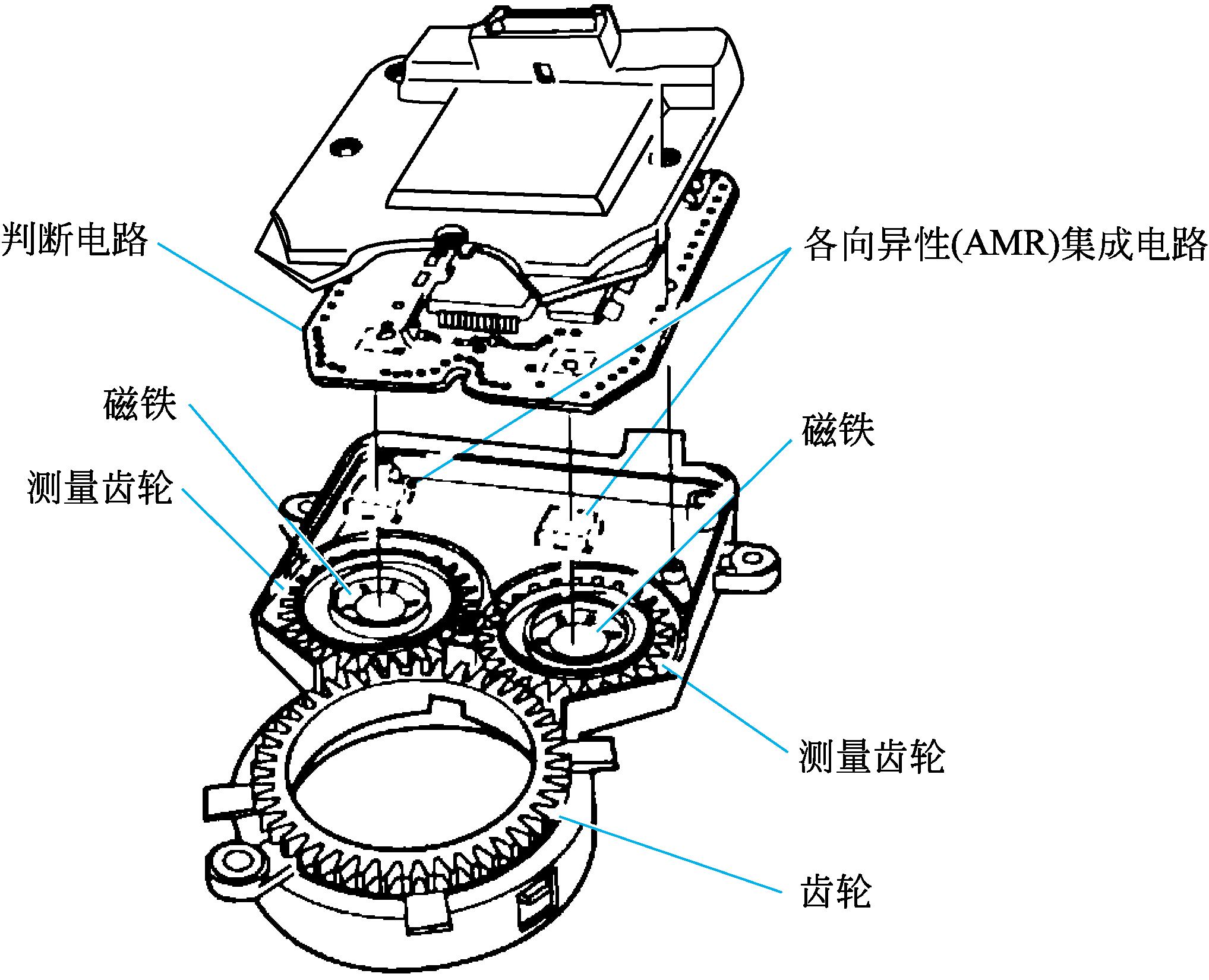
圖2-87 方向盤轉角傳感器的構造
2.工作原理
當駕駛員轉動方向盤時,由鍵與方向盤連接的齒輪帶動兩個中心部分的磁鐵的測敏齒輪轉動。磁鐵上方AMR傳感器的電阻隨著測量齒輪的轉動而改變,電阻的變化反映了測量齒輪的位置,進而反映了方向盤角度的變化,即能產生一個可表示±760°方向盤旋轉角度的輸出信號。傳感器的模擬輸出信號通過一個A/D轉換器輸入到微處理器中,結合兩個測量齒輪轉動后的位置可以求出總的轉動角度。由于兩個測量齒輪的齒數(shù)不同,它們的轉動速度也不同,故產生不同相位的兩個轉角信號,電子控制單元利用這個信息計算出駕駛員所要求的方向。
這種傳感器的一個特點是在發(fā)動機點火時刻就可以立即得到方向盤絕對轉角位置,無需利用算法推斷。傳感器信號通過CAN總線輸出。傳感器框圖如圖2-88所示。

圖2-88 各向異性磁阻式方向盤轉角傳感器框圖
3.連接電路
別克榮御方向盤轉角傳感器的線路連接和各端子功用見圖2-89。
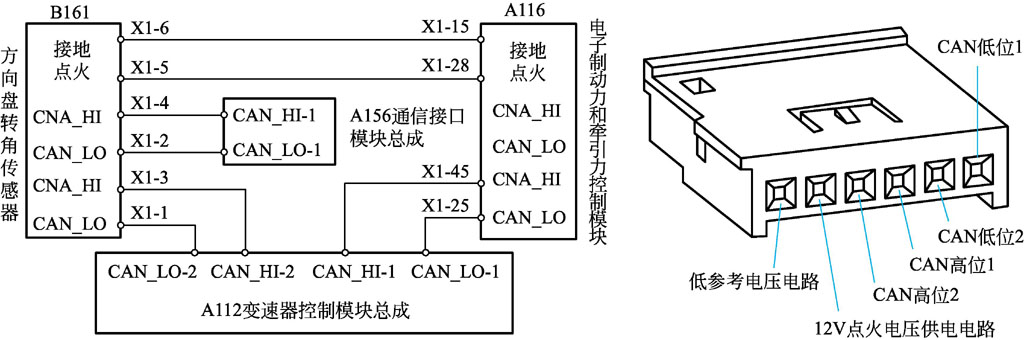
圖2-89 方向盤轉角傳感器的線路連接和各端子功用
4.檢測
根據(jù)圖2-89,可以進行如下檢測。
(1)檢測供電電壓
關閉點火開關,脫開傳感器插頭,再將點火開關置于“ON”,使用萬用表測量5與6端電壓,應該為12V,否則應檢查線路。
(2)解碼器讀取故障碼
由于傳感器信號通過CAN總線輸出,因此通過解碼器的自診斷檢測是比較準確和快捷的方法。方向盤轉角傳感器出現(xiàn)故障,則會顯示故障代碼C0460。
(3)校準方向盤轉角傳感器
電子控制單元監(jiān)測并判斷方向盤轉角傳感器的輸出信號,當車輛沿直線行駛了15min或以上時,電子控制單元將該行駛方向設定為正前方向。可使用Tech2進行方向盤轉角傳感器校準,初始化傳感器的具體操作步驟如下。
①將方向盤置于車輛筆直向前的正中位置。
②將Tech2連接到車輛上,并執(zhí)行“Tech2方向盤轉角傳感器校準程序”即可。