- 激光雷達(dá)感知與定位:從理論到實(shí)現(xiàn)
- 申澤邦 周慶國 郅朋編著
- 13字
- 2025-08-07 17:36:59
1.2 激光雷達(dá)與自動(dòng)駕駛的發(fā)展
1.2.1 早期的激光雷達(dá)
激光雷達(dá)誕生于20世紀(jì)60年代,最初主要應(yīng)用于航空航天領(lǐng)域的地形測(cè)繪任務(wù),科研人員使用機(jī)載激光雷達(dá)對(duì)地球的森林、冰川、海洋等進(jìn)行遙感測(cè)繪。美國國家航空航天局(National Aeronautics and Space Administration,NASA)曾經(jīng)使用激光雷達(dá)對(duì)月球表面進(jìn)行遙感測(cè)繪,進(jìn)而得到了月球表面的地形高度圖。圖1-3所示為NASA在20世紀(jì)90年代發(fā)射的“克萊芒蒂娜號(hào)”探測(cè)器使用激光雷達(dá)測(cè)繪得到的月球表面地形高度圖。
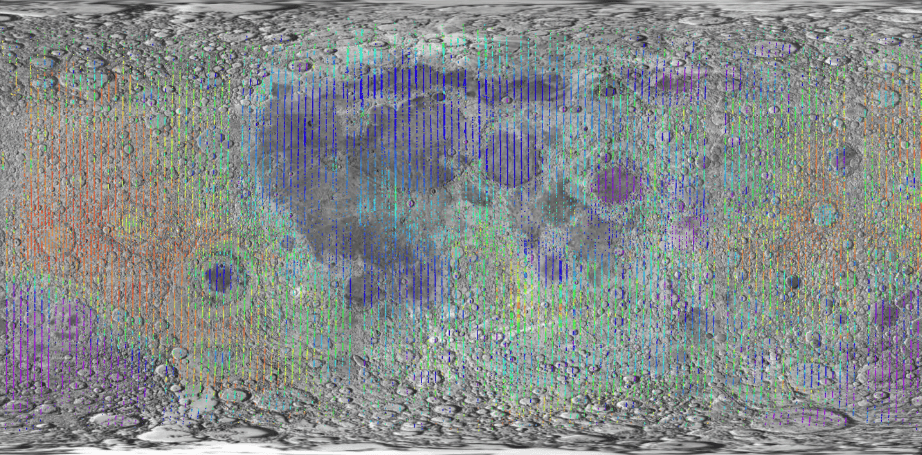
*圖1-3 “克萊芒蒂娜號(hào)”探測(cè)器使用激光雷達(dá)測(cè)繪得到的月球表面地形高度圖
到20世紀(jì)90年代中期,激光束發(fā)射頻率為2000~25 000 Hz的商用激光雷達(dá)被制造并交付用于地形測(cè)繪,鞏固了激光雷達(dá)在各類測(cè)繪應(yīng)用中的領(lǐng)導(dǎo)地位。
隨著機(jī)器人技術(shù)的發(fā)展,和激光雷達(dá)同原理的單線激光雷達(dá)被廣泛應(yīng)用于機(jī)器人導(dǎo)航、即時(shí)定位與地圖構(gòu)建(simultaneous localization and mapping,SLAM)和避障。早期應(yīng)用于機(jī)器人領(lǐng)域的激光雷達(dá)多為單激光器的掃描儀(即單線激光雷達(dá)),其中的代表是德國西克(SICK)公司生產(chǎn)的安全激光掃描儀全系產(chǎn)品。單線激光雷達(dá)產(chǎn)生的點(diǎn)云數(shù)據(jù)為二維平面點(diǎn)云數(shù)據(jù),由于信息稀少,通常不用于室外導(dǎo)航,在機(jī)器人感知領(lǐng)域通常只能用于防撞(即使是人類也無法基于簡(jiǎn)單的平面點(diǎn)云數(shù)據(jù)理解環(huán)境的語義信息),在機(jī)器人導(dǎo)航領(lǐng)域,單線激光雷達(dá)用于SLAM。圖1-4所示為使用單線激光雷達(dá)構(gòu)建的室內(nèi)SLAM圖。
提示:本書關(guān)注激光雷達(dá)在自動(dòng)駕駛汽車中的應(yīng)用,為典型的室外應(yīng)用場(chǎng)景,所以后面關(guān)于激光雷達(dá)本身以及相關(guān)算法的表述通常僅指車載三維多線激光雷達(dá),二維單線激光雷達(dá)不在本書討論范圍,并且本書討論的算法不適用于單線激光雷達(dá)。
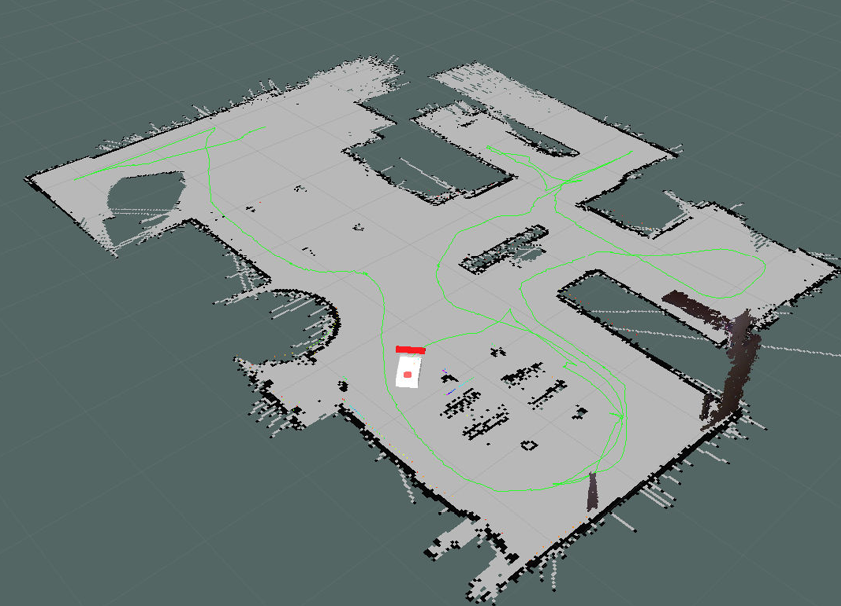
圖1-4 使用單線激光雷達(dá)構(gòu)建的室內(nèi)SLAM圖
- Splunk 7 Essentials(Third Edition)
- 大數(shù)據(jù)戰(zhàn)爭(zhēng):人工智能時(shí)代不能不說的事
- 大數(shù)據(jù)管理系統(tǒng)
- 機(jī)器學(xué)習(xí)及應(yīng)用(在線實(shí)驗(yàn)+在線自測(cè))
- Learning Apache Spark 2
- 數(shù)控銑削(加工中心)編程與加工
- 電腦上網(wǎng)直通車
- CompTIA Linux+ Certification Guide
- Grome Terrain Modeling with Ogre3D,UDK,and Unity3D
- 網(wǎng)絡(luò)安全管理實(shí)踐
- 空間站多臂機(jī)器人運(yùn)動(dòng)控制研究
- 中國戰(zhàn)略性新興產(chǎn)業(yè)研究與發(fā)展·智能制造裝備
- INSTANT Munin Plugin Starter
- Mastering Ansible(Second Edition)
- 數(shù)據(jù)庫基礎(chǔ):Access