- 非線性算子控制及其應用
- 溫盛軍
- 12字
- 2020-08-05 14:43:23
第1章 非線性系統控制概論
1.1 控制系統相關概念
自動控制理論是研究關于自動控制系統組成、分析和設計的一般性理論,是研究自動控制共同規律的技術科學。自動控制理論的任務是研究自動控制系統中變量的運動規律以及改變這種運動規律的可能性和途徑,為建立高性能的自動控制系統提供必要的理論根據。
自動控制系統是指由控制主體、控制客體和控制媒體組成的具有自身目標和功能的管理系統。控制系統意味著通過它可以按照所希望的方式保持和改變機器、機構或其他設備內任何感興趣或可變的量。控制系統同時是為了使被控制對象達到預定的理想狀態而實施的,使被控制對象趨于某種需要的穩定狀態。
自動控制系統由被控對象和控制裝置兩大部分組成,根據其功能,后者又是由具有不同職能的基本元部件組成的。自動控制系統典型結構如圖1-1所示,主要由被控對象、測量反饋元件、比較元件、執行元件和控制器組成[1]。
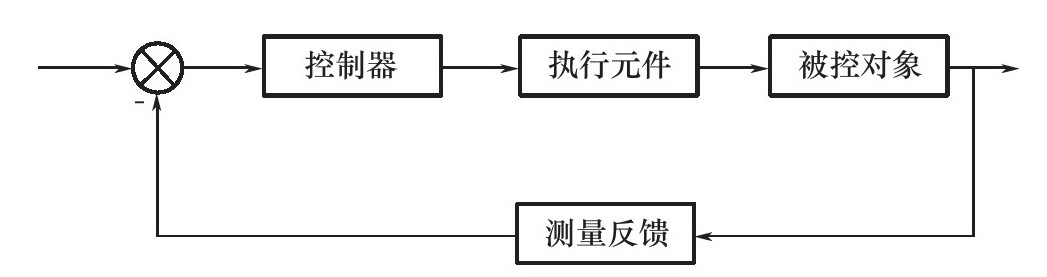
圖1-1 自動控制系統典型結構
被控對象一般是指生產過程中需要進行控制的工作機械、裝置或生產過程。描述被控對象工作狀態的、需要進行控制的物理量就是被控量。
測量反饋元件用于對輸出量進行測量,并將其反饋至輸入端。如果測出的物理量屬于非電量,大多情況下要把它轉化成電量,以便利用電的手段加以處理。例如測速發電機,就是將電動機軸的速度檢測出來并轉換成電壓。
比較元件是對實際輸出值與給定元件給出的輸入值進行比較,求出它們之間的偏差。常用的電量比較元件有差動放大器、電橋電路等。
執行元件的功能是,根據放大元件放大后的偏差信號,推動執行元件去控制被控對象,使其被控量按照設定的要求變化。通常,電動機、液壓馬達等都可作為執行元件。
控制器又稱補償元件,用于改善系統的性能,通常以串聯或反饋的方式連接在系統中。是為改善或提高系統的性能,在系統基本結構基礎上附加參數可靈活調整的元件。
與控制系統相關的一些概念如下:
·被控變量:被控對象內要求保持設定值的工藝參數。
·操縱變量:受控制器操縱的,用以克服干擾的影響,使被控變量保持設定值的物料量或能量。
·擾動量:除操縱變量外,作用于被控對象并引起被控變量變化的因素。
·設定值:被控變量的預定值。
·偏差:被控變量的設定值與實際值之差。
·閉環自動控制:是指控制器與被控對象之間既有順向控制又有反向聯系的自動控制。
·開環控制系統:是指控制器與被控對象之間之有順向控制而沒有反向聯系的自動控制系統。
·反饋:把系統的輸出信號直接或經過一些環節重新引回到輸入端。反饋信號的作用方向與設定信號相反,即偏差信號為兩者之差,這種反饋叫作負反饋,反之為正反饋。
自動控制系統中的方塊圖是由傳遞方塊、信號線、綜合點、分枝點構成的表示控制系統組成和作用的圖形。一個典型的衰減振蕩過程曲線,衰減振蕩的品質指標有以下幾個:最大偏差、衰減比、余差、過渡時間、振蕩周期(或頻率)。最大偏差是指過渡過程中被控變量偏離設定值的最大數值。衰減比是指過渡過程曲線上同方向第一個波的峰值與第二個波的峰值之比。余差是指過渡過程終了時,被控變量所達到的新的穩態值與設定值之間的差值。過渡時間是指控制系統受到擾動作用后,被控變量從原穩定狀態回復到新的平衡狀態所經歷的最短時間。振蕩周期是指過渡過程同向兩波峰之間的間隔時間,其倒數為振蕩頻率,在衰減比相同的條件下,周期與過渡時間成正比,一般希望振蕩周期短一些好。
自動控制系統按照不同的特征和標準,有不同的分類方法。按控制系統的結構,可分為開環控制系統、閉環控制系統和復合控制系統。按給定信號的形式,可將控制系統劃分為恒值控制系統和隨動控制系統。按系統參數是否隨時間變化,可以將控制系統分為定常系統和時變系統。按控制系統的動態特性分類,可分為線性控制系統和非線性控制系統。按控制系統閉環回路的數目分類,可分為單回路控制系統和多回路控制系統。按照輸入信號和輸出信號的數目分類,可將系統分為單輸入單輸出系統和多輸入多輸出系統。按控制動作和時間的關系分類,可分為連續控制系統和離散控制系統。
在輸入量的作用下,系統的輸出變量由初始狀態達到最終穩態的中間變化過程稱過渡過程,又稱瞬態過程。過渡過程結束后的輸出響應稱為穩態過程。系統的輸出響應由過渡過程和穩態過程組成。過渡過程是指對于任何一個控制系統,擾動作用是不可避免的客觀存在,系統受到擾動作用后,其平衡狀態被破壞,被控變量就要發生波動,在自動控制作用下,經過一段時間,使被控變量回復到新的穩定狀態。把系統從一個平衡狀態進入另一個平衡狀態之間過程。
對自動控制系統品質指標的基本要求可以歸納為三個字:穩、準、快。
穩:是指系統的穩定性。穩定性是系統重新恢復平衡狀態的能力。任何一個能夠正常工作的控制系統,首先必須是穩定的。穩定是對自動控制系統的最基本要求。
但由于閉環控制系統有反饋作用,控制過程有可能出現振蕩或發散。
準:是對系統穩態(靜態)性能的要求。對一個穩定的系統而言,當過渡過程結束后,系統輸出量的實際值與期望值之差稱為穩態誤差,是衡量系統控制精度的重要指標。穩態誤差越小,系統的準確性越好。
快:是對系統動態性能(過渡過程性能)的要求。描述系統動態性能可以用平穩性和快速性加以衡量。平穩指系統由初始狀態運動到新的平衡狀態時,具有較小的過調和振蕩性;快速指系統運動到新的平衡狀態所需要的調節時間較短。動態性能是衡量系統質量高低的重要指標。
各種不同系統對三項性能指標的要求會有所側重。例如恒值系統一般對穩態性能限制比較嚴格,隨動系統一般對動態性能要求較高。控制系統設計的主要步驟如下:
(1)控制系統設計目標的設定。
(2)對被控對象的分析及建立數學模型。
(3)控制系統設計方案的決定。
(4)Simulink仿真。
(5)編寫控制代碼。
(6)控制器硬件實現。
- 電容探測原理及應用
- 辦公自動化高級應用案例教程
- 戰略管理:概念與案例(原書第21版)
- 丁樹杞《大學俄語(7)》(東方老版)學習指南【詞匯短語+課文精解+單元語法+全文翻譯+練習答案】
- 周三多《管理學》(第5版)筆記和課后習題(含考研真題)詳解
- George Yule《語言研究》(第2版)配套題庫【課后練習+章節題庫(含名校考研真題)+模擬試題】
- 建筑形態構成
- 服務外包企業戰略管理(廣東外語外貿大學國際服務外包人才培訓系列教材)
- 連鎖企業門店營運與管理
- 燃燒與阻燃實驗
- 丁樹杞《大學俄語(6)》(東方老版)學習指南【詞匯短語+課文精解+全文翻譯+練習答案】
- 福建師范大學外國語學院211翻譯碩士英語[專業碩士]歷年考研真題及詳解
- 楊豈深《英國文學選讀Book 3》筆記和考研真題詳解
- 大學生社會責任感培育路徑研究
- 人機交互概論:從理論到應用