- 空間機械臂建模、規(guī)劃與控制
- 陳鋼
- 778字
- 2020-04-22 12:08:48
1.1.2 空間機械臂的構成
空間機械臂包含機械臂和基座2個部分。機械臂由關節(jié)和連桿交替連接構成,其一端固定于基座,另一端(末端)安裝有末端執(zhí)行器。空間機械臂簡化結構如圖1-1所示。
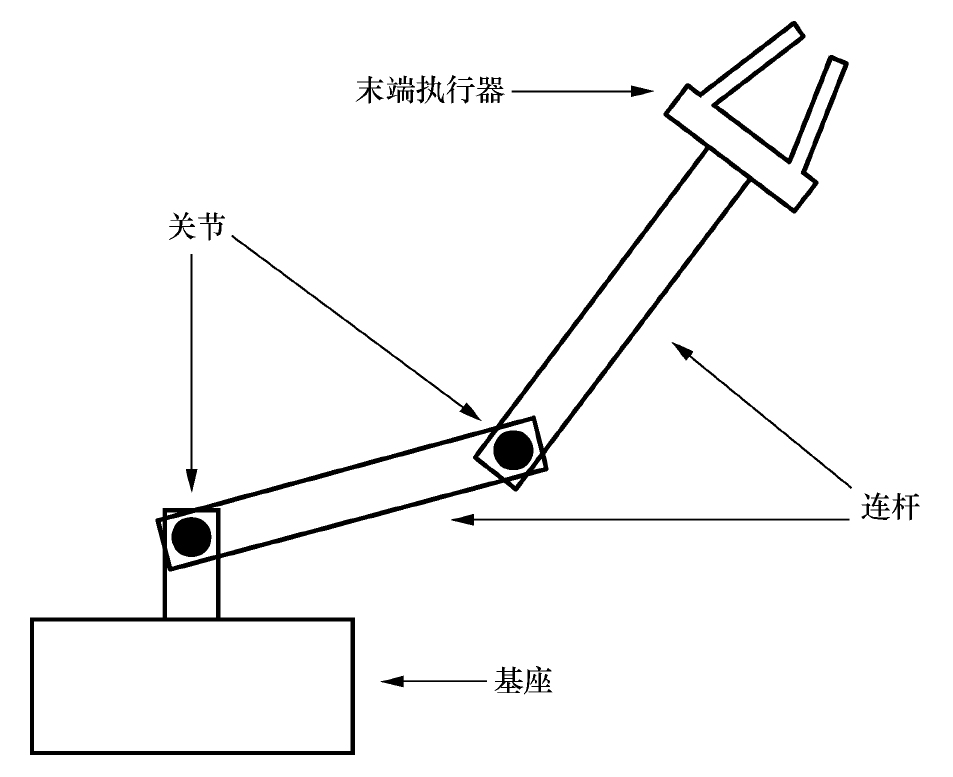
圖1-1 空間機械臂簡化結構
1. 基座
基座是搭載機械臂的平臺。根據(jù)不同的任務需求,機械臂可安裝于不同類型的基座上,如國際空間站、衛(wèi)星、星表巡視器(如月球車、火星車)等,如圖1-2所示。由于基座與機械臂間存在運動耦合,機械臂運動會對基座產(chǎn)生擾動,使基座姿態(tài)發(fā)生變化,進而影響空間機械臂操作精度,最終有可能導致空間機械臂操作任務失敗。
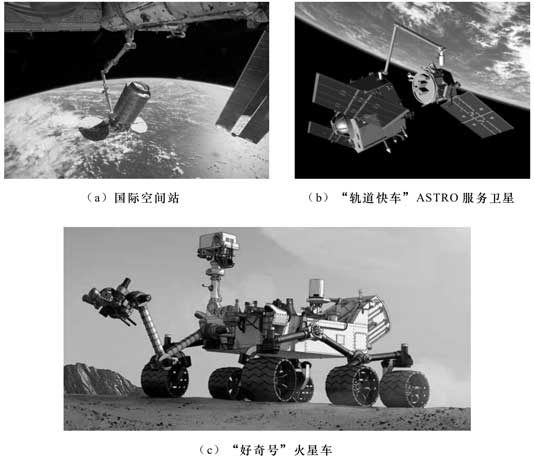
圖1-2 空間機械臂的基座
2. 關節(jié)
關節(jié)是機械臂的驅動部件。機械臂的常用關節(jié)類型主要有旋轉關節(jié)、移動關節(jié)、球形關節(jié)、圓柱關節(jié)等。空間機械臂通常利用多個旋轉關節(jié)(下文簡稱關節(jié))構建多自由度(Degree of Freedom,DOF)系統(tǒng),通過多關節(jié)的協(xié)同運動使機械臂末端到達期望的位置與姿態(tài)(簡稱位姿)。描述關節(jié)轉動的物理量為關節(jié)角(也被稱為角位移、轉動角等),機械臂所有關節(jié)角組成的向量稱為機械臂的構型,由所有構型組成的集合稱為空間機械臂的關節(jié)空間。
3. 連桿
連桿是連接空間機械臂各個關節(jié),使關節(jié)運動傳遞至機械臂末端的構件。出于降低發(fā)射成本的考慮,空間機械臂的連桿一般采用輕質桿件,在執(zhí)行大負載操作任務時連桿可能會出現(xiàn)扭轉、彎曲等柔性變形,從而增大空間機械臂任務規(guī)劃與控制的難度。
4. 末端執(zhí)行器
末端執(zhí)行器是空間機械臂執(zhí)行任務所依賴的機構。依據(jù)不同任務(捕獲對接、燃料加注以及在軌維護等)需求可將不同的末端執(zhí)行器(如捕獲對接機構、燃料加注工具、機械手等,如圖1-3所示)安裝于空間機械臂末端。
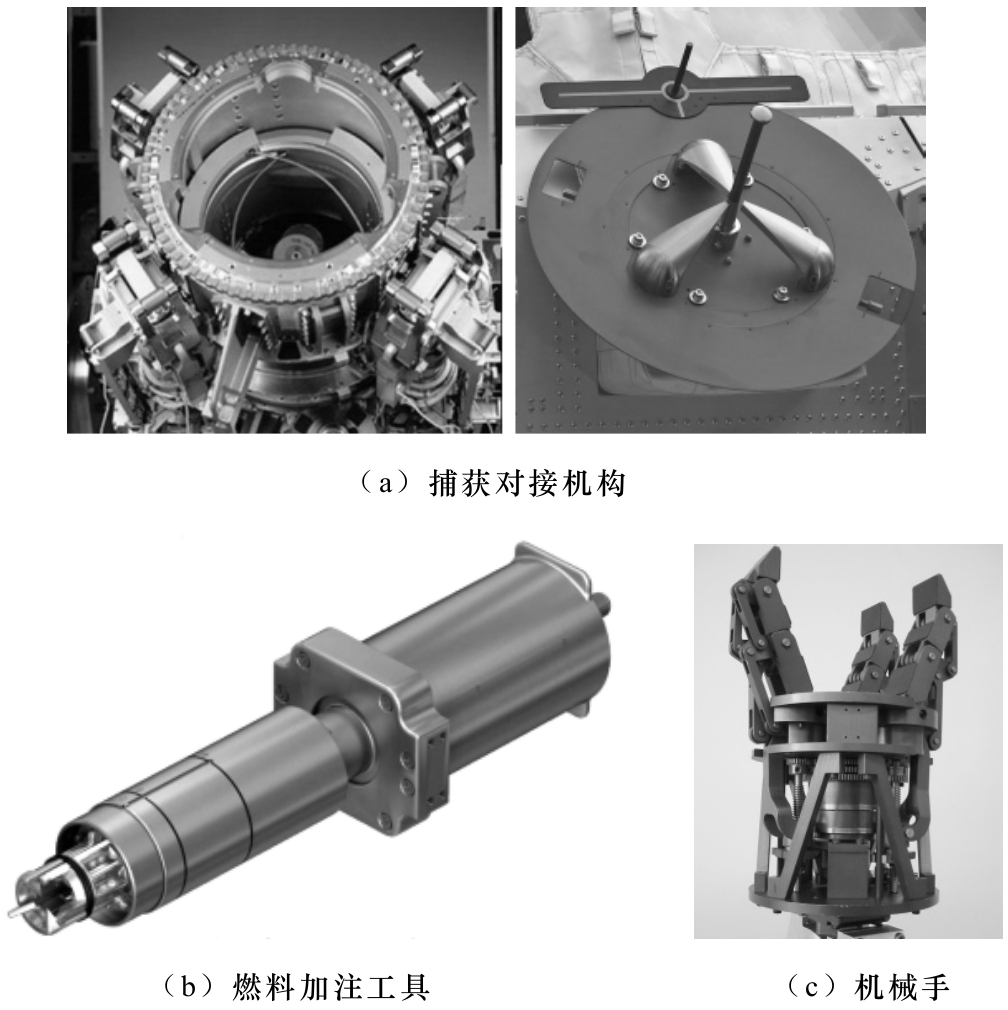
圖1-3 空間機械臂的末端執(zhí)行器
除上述必要的構成組件之外,空間機械臂通常還搭載視覺系統(tǒng)(便于空間站艙體探查)、照明系統(tǒng)和臨時存儲設備(支持宇航員艙外活動)、力矩傳感器(為機械臂提供觸覺,提升操作精度)等,從而能夠勝任繁重復雜的空間操作任務。
- 虛擬儀器設計測控應用典型實例
- Learning Apache Cassandra(Second Edition)
- 計算機網(wǎng)絡應用基礎
- Mastering Machine Learning Algorithms
- 計算機系統(tǒng)結構
- 中國戰(zhàn)略性新興產(chǎn)業(yè)研究與發(fā)展·智能制造
- Windows Server 2003系統(tǒng)安全管理
- DevOps Bootcamp
- ASP.NET 2.0 Web開發(fā)入門指南
- Cloudera Hadoop大數(shù)據(jù)平臺實戰(zhàn)指南
- 電氣控制及Micro800 PLC程序設計
- 中文版Photoshop情境實訓教程
- Hands-On Artificial Intelligence for Beginners
- 數(shù)據(jù)庫技術及應用
- Mastering Windows Group Policy