- 激光雷達感知與定位:從理論到實現
- 申澤邦 周慶國 郅朋編著
- 908字
- 2025-08-07 17:37:02
1.3.2 激光雷達在自動駕駛系統中的應用
自動駕駛汽車依賴感知模塊對周圍環境進行準確建模,其中包括對其他車輛、行人、非機動車、施工牌和錐桶等動態目標或靜態目標進行檢測和狀態估計。通常,自動駕駛系統的感知模塊通過多種傳感器數據的輸入和處理完成精準、魯棒的環境感知,這些傳感器包括激光雷達、相機、毫米波雷達、超聲波雷達等。其中,激光雷達、毫米波雷達和超聲波雷達為主動式傳感器,相機為被動式傳感器。主動式傳感器是向目標發射電磁波,然后收集從目標反射回來的電磁波信號的傳感器[5];被動式傳感器是只能收集目標反射的來自太陽光的信號或目標自身輻射的電磁波信號的傳感器。可見,主動式傳感器不受環境光線條件影響,無論是白天還是黑夜都能實現一致的成像效果,而被動式傳感器在白天和夜晚的成像效果則截然不同。
作為主動式傳感器,激光雷達向環境發射波長為750 nm~1.5 μm的近紅外電磁波,接收環境反射的電磁波信號以成像,具有測距精度高、不受環境光線影響等特點。激光雷達的分辨率處在相機和毫米波雷達之間,其數據密度低于相機但是高于毫米波雷達。稠密的點云數據讓激光雷達在環境感知環節能夠提供目標準確的位置、朝向乃至輪廓信息,補充相機測距不準確的短板;相比于毫米波雷達,激光雷達能夠提供更加稠密的點云數據,對靜態障礙物的識別也更加可靠、準確。所以說,激光雷達是多傳感器融合感知的重要數據源。
同樣地,自動駕駛汽車依賴于定位模塊以確定自身的位置和姿態,如前面所討論的,基于GNSS的定位方法雖然能夠獲得絕對定位數據,但存在精度差、易受環境影響等問題,主流的自動駕駛定位方法采用以地圖配準為主的多傳感器融合定位方法。所謂地圖配準,指的是匹配當前傳感器測量數據和地圖數據以確定車輛相對于地圖的位置和姿態。激光雷達配準定位示例如圖1-9所示。
激光雷達和相機的數據均可作為配準定位的測量數據,毫米波雷達的數據因為密度過低一般不能用于配準定位。激光雷達對環境在幾何方面具有更高的測距精度,故基于激光雷達的配準定位方法的定位精度也遠高于基于相機的。此外,基于激光雷達的配準定位方法能夠在純夜間無光條件下實現厘米級高精度定位,這一點也是基于相機的配準定位方法很難達到的。
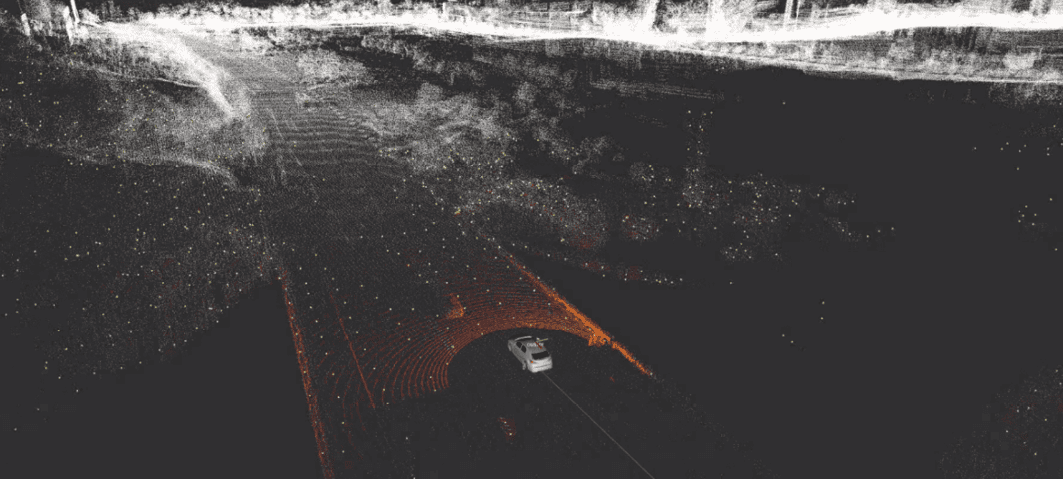
圖1-9 激光雷達配準定位示例