- 多傳感器數(shù)據(jù)智能融合理論與應(yīng)用
- 戴亞平 馬俊杰 王笑涵編著
- 694字
- 2021-10-27 15:10:08
2.1.2 分布式融合結(jié)構(gòu)
分布式融合是將各傳感器在完成對常量或緩變參數(shù)的測量后,首先進行自身的局部參數(shù)估計,然后再把局部參數(shù)估計值傳給融合中心,由融合中心來完成最終的參數(shù)估計。在分布式融合結(jié)構(gòu)中,每個傳感器都可獨立地處理其自身信息,之后將各決策結(jié)果送至數(shù)據(jù)融合中心,再進行融合。與集中式融合相比,分布式融合系統(tǒng)所要求的通信開銷小,融合中心計算機所需的存儲容量小,擴展了多傳感器測量系統(tǒng)參數(shù)估計的靈活性,增強了系統(tǒng)的生存能力且融合速度快,但這是以損失融合中心信息的完整性為代價的。
隨著通信技術(shù)、嵌入式計算技術(shù)和傳感器技術(shù)的飛速發(fā)展和日益成熟,具有感知能力、計算能力和通信能力的微型傳感器開始得到應(yīng)用。由這些微型傳感器構(gòu)成的分布式傳感器網(wǎng)絡(luò)(Distributed Sensor Network,DSN)成為近年來一個重要的研究領(lǐng)域。20世紀80年代,R.Wesson等最早開始了分布式傳感器網(wǎng)絡(luò)的研究,主要是對分布式傳感器網(wǎng)絡(luò)結(jié)構(gòu)的研究。目前,國外各科研機構(gòu)投入巨資,啟動了許多關(guān)于DSN的研究計劃。
一個分布式多傳感器系統(tǒng)包括一系列傳感器節(jié)點和相應(yīng)的處理單元,以及連接不同處理單元的通信網(wǎng)絡(luò)。每個處理單元連接一個或多個傳感器,每個處理單元以及與之相連的傳感器被稱為簇。數(shù)據(jù)從傳感器傳送至與之相連的處理單元,在處理單元處進行數(shù)據(jù)集成。最后,將處理單元的信息進一步相互融合以獲得最佳決策。
在分布式融合系統(tǒng)中,融合節(jié)點有預(yù)處理的功能,信息在經(jīng)過預(yù)處理后再傳送給融合中心產(chǎn)生融合結(jié)果。由于對信息進行了壓縮與處理,這種融合方式降低了對通信帶寬的要求和造價,利用高速通信網(wǎng)絡(luò)就可以完成非常復(fù)雜的算法,并得到更好的融合結(jié)果。分布式融合估計的流程示意圖如圖2.2所示。
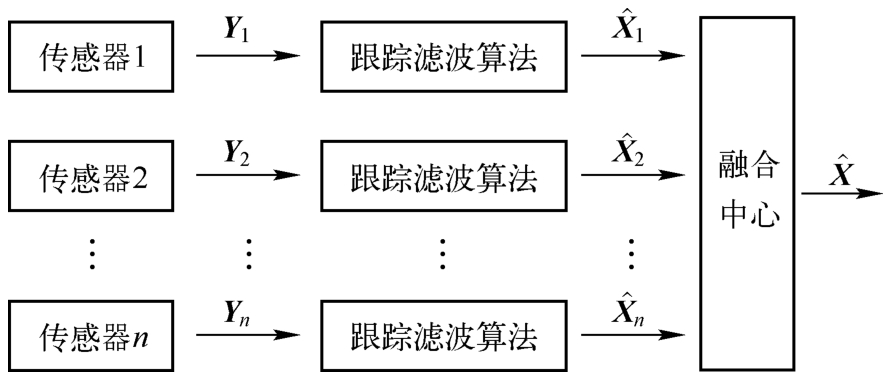
圖2.2 分布式融合估計流程示意圖
- 21小時學通AutoCAD
- Visual Basic從初學到精通
- 傳感器技術(shù)應(yīng)用
- 小型電動機實用設(shè)計手冊
- 數(shù)據(jù)挖掘方法及天體光譜挖掘技術(shù)
- 大數(shù)據(jù)技術(shù)與應(yīng)用
- 構(gòu)建高性能Web站點
- 聊天機器人:入門、進階與實戰(zhàn)
- 分數(shù)階系統(tǒng)分析與控制研究
- Mastering ServiceNow Scripting
- 走近大數(shù)據(jù)
- Ansible 2 Cloud Automation Cookbook
- INSTANT VMware vCloud Starter
- Mastering Ansible(Second Edition)
- C#求職寶典